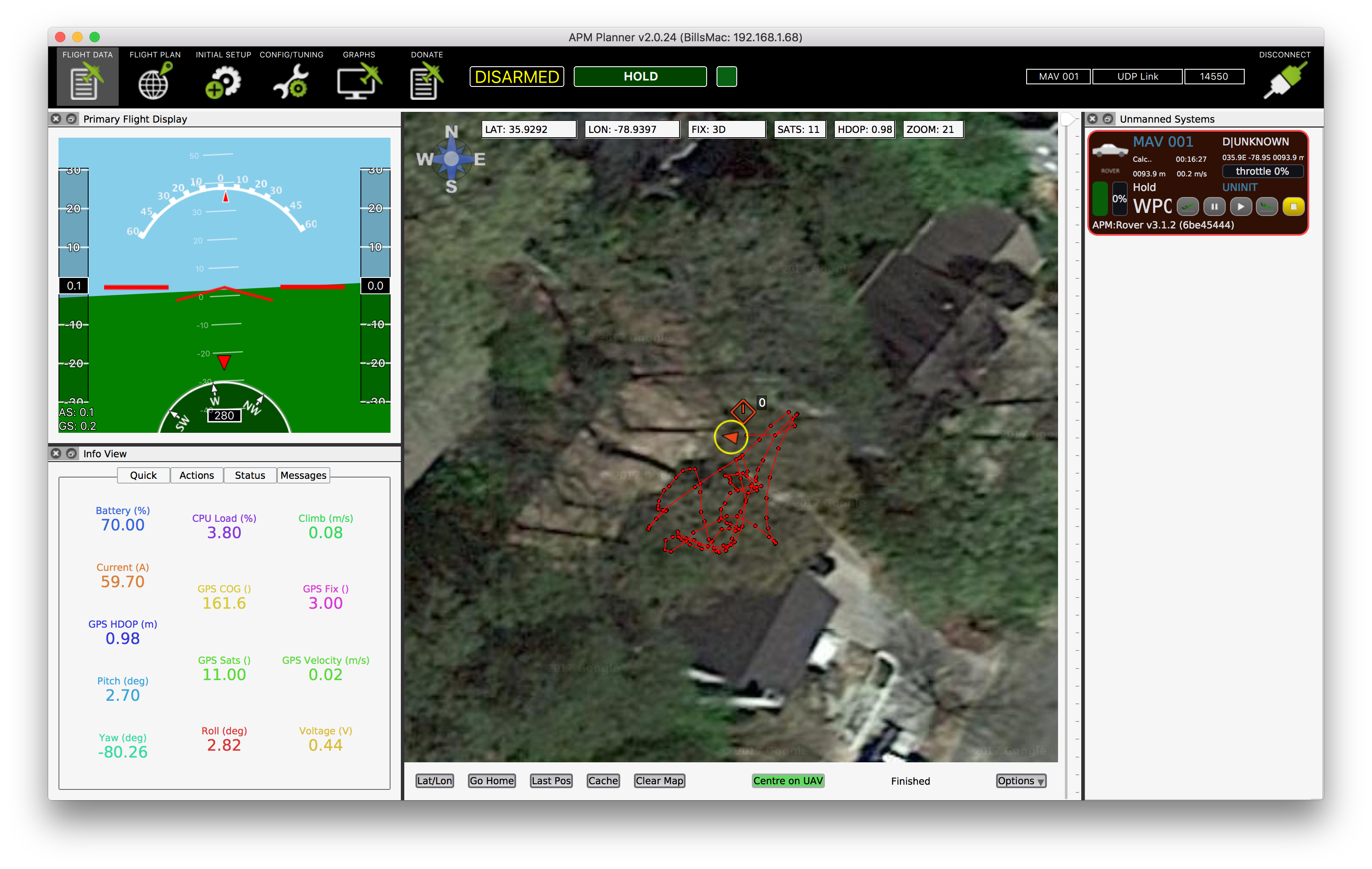
Finally got my rover operational and travelling (roughly) to GPS waypoints. When its stationary, it seems to float around in APM though. I’ve attached an image. Is this normal? The heading does seem a slight bit off when compared to a compass app on my phone. I’ve run through the calibration steps per both Emlid and Ardupilot docs.