Probably a stupid question but I’m not able to find the answer anywhere.
I’m a bit confused by the different types of logging that is available.
I get that the RINEX/UBX file is the raw data that can be corrected with the base logs. However I’m not quite sure about the position data (XYZ,LLH,ENU,NMEA). Is this also raw data from the rover? I’m asking this because when I plot my corrected data (RINEX + corrections from base) show a drift over time but when plotting the XYZ-data there is no drift visible.
So if the XYZ-data is raw there is probably a problem with the base.
A position log contains calculated coordinates. If you work in RTK, it will be coordinates calculated using the base corrections. If there are no base corrections, it will be coordinates calculated based only on the rover’s own data. The log is continuous, and usually, you see the track you took with the rover.
What do you mean by a drift? Maybe you have some screenshots?
P.S. No one question is stupid on our forum, feel free to ask
For some context:
I’m using the Reach system for the development of an AGV. This AGV is driving around on a test track and I want to be able to verify its own internal localization system and to see if changes in the machine or in the software have a positive effect on the navigation quality of the machine.
So ideally I want to compare the external data of the Reach with the internal data of the machine.
Unfortunately this test track is located near a building which could influence the quality of the GPS logs. However, the base station is placed on a location which has clear sky visibility.
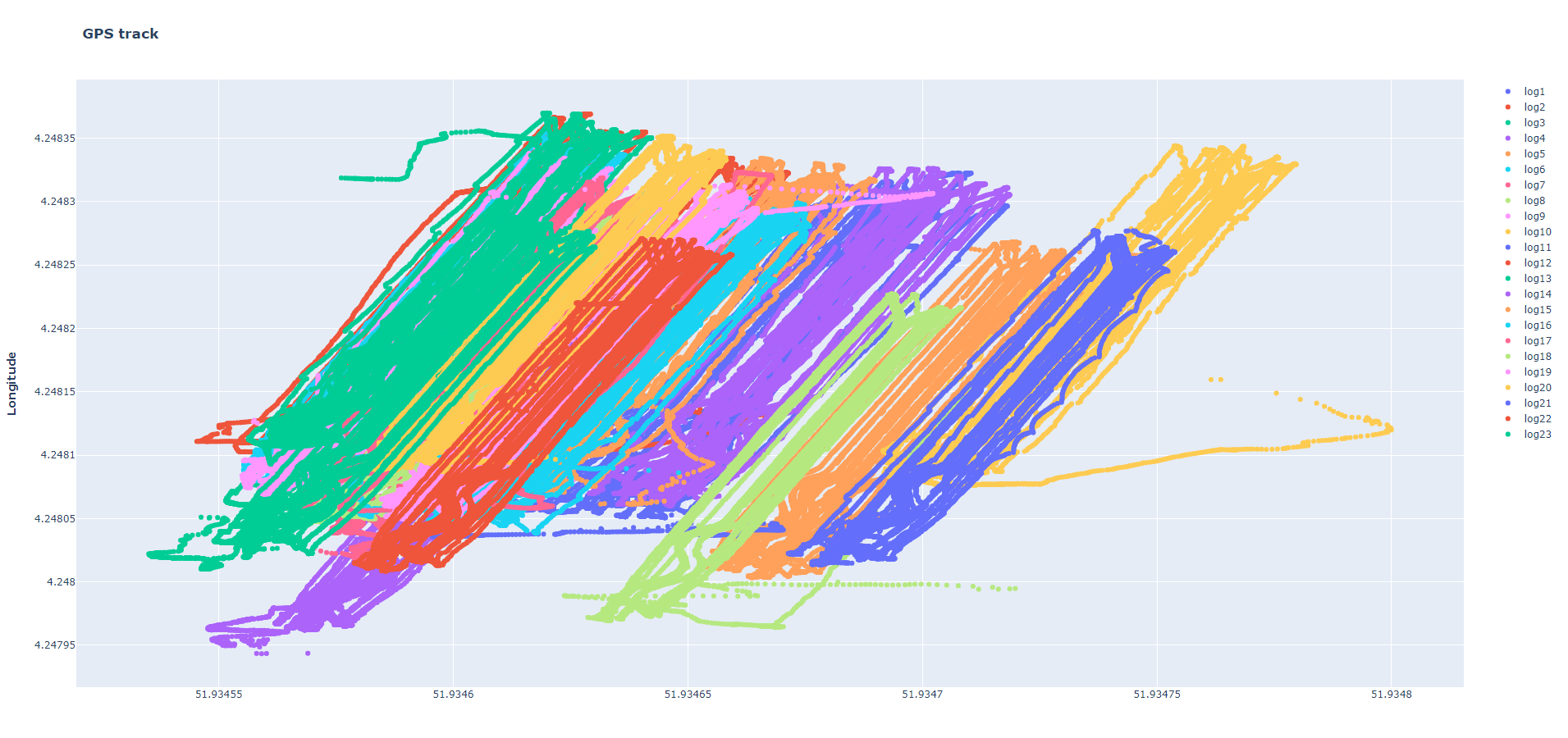
Attached are both the XYZ position data and the data of the rover corrected with the base data. The log split period was set to 1 hour (can this have an influence on the drift as well? I want to try increasing this time).
The figure of the XYZ data shows paths that overlap pretty well. The figure of the corrected rover data shows paths that overlap pretty well during the same log period but when the log period has elapsed the complete path shifts.
Let me know what you think!
If anything is unclear, please let me know.
So, do you work in RTK and then compare RTK results with PPK ones? Or is there no real-time connection between base and rover in the field? Because if so, the Position log contains solutions with several meters accuracy only.
If you work in RTK, make sure you use the same base position in RTK and post-processing. I can tell you a bit more about that if you describe how you set up the base. Do you use Manual or Averaging mode in ReachView?
Yes I work in RTK mode, the base and the rover have a real-time connection.
If I understand you correctly the position logs are the RTK results and the corrected rover logs are the PPK results?
If so, yes that is what I’m comparing.
I used averaging mode in ReachView for I think 10 minutes.
@svetlana.nikolenko
I think so, I don’t think I changed that setting but I performed these measurements quite a while ago so I’m not 100% sure. Is this also stored somewhere in a log file that I can look up?
I suppose it was Average Single since it’s a default one. I see where the issue is now.
In that case, the base position was averaged with several meters accuracy.
During post-processing, most likely, you used the RINEX Header position as a base position. The position in RINEX Header is also averaged and has several meters of accuracy. But it differs from the one that was Averaged in ReachView.
So your base position in RTK and PPK differ in several meters. That’s why your results are shifted.
To have consistency in results, you need to write down the coordinates that were averaged in ReachView and use the same coodinates during post-processing.
I will try that next time I will repeat the test.
In your opinion is this the best way to approach it? Or is it better to choose a different setting in the coordinates entry method in the base mode settings?
Does this also mean that it is not possible to compare results of different measurements with each other in an absolute sense? Since the base position will be different when setting it up every time.
You can use the same (averaged in Single) base position every time. If you don’t need absolute accuracy for your points, of course. I mean, if you only want to compare measurements from different days with each other, it should work fine.
If you need to match your measurements with 3rd-party ones or a global map, it’s better to establish a known point using PPP, for instance.