I am here to request your help. I hope this is the right forum for this.
I have been trying to fly my drone, and I triggered POS HOLD, but the drone shot to the sky and then fly out of range, after that, I panicked and crashed the drone. Could you help me to understand what happened?
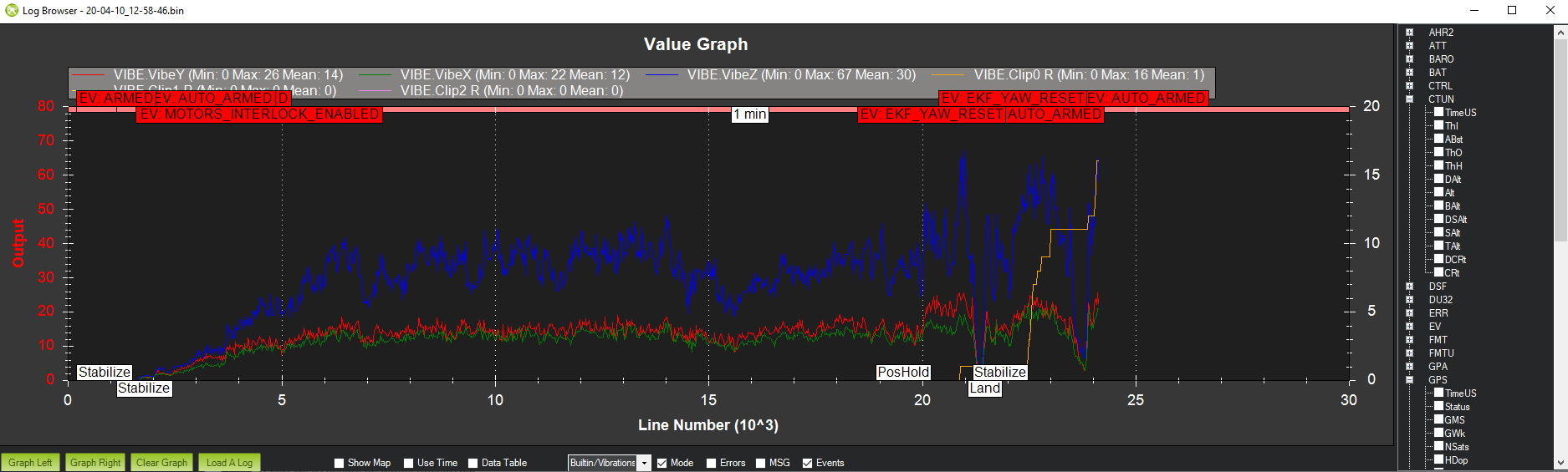
We’ve looked into your log and at the moment it doesn’t seem to be an accelerometer issue. According to the log, it looks like there are quite large vibrations on the drone.
May I ask you to take off the props and try running motors one-by-one? While testing, please touch the frame near each motor to check if the vibrations from them differ a lot.
It looks much better this time, but the vibrations still present. May I ask you to try configuring PID? You can start with Autotune.
Vibrations from this log seem to not exceed the recommended by ArduPilot level. It looks like everything is fine with them now.
It’s still possible to lower them though (if you want to do that). This can improve the performance a bit more, and the tips I specified above may help with that.