



I brought a couple of RS2 units a while back and have never managed to get a decent baseline between the base and rover. I gave up and reverted to using our Topcon Hiper V but am now back on the case as I need to get these RS2 working. I am using all the recommended settings for LoRa but can only manage about 500m before the link drops out, and this is in flat open terrain. I have matching frequency (918.1) , output power (20db) , and air data rate (9.11 kb/s), the base is in Base Mode and the Rover correction inputs are setup correctly. Any advice?
Hi Will,
Are there any severe obstacles like buildings between the base and the rover? LoRa is low-powered radio which requires a line of sight between receiver and transmitter.
1 Like
Hi Tatiana,
Yes this is in clear, flat, open terrain. It is line of sight between the base and rover. I am reading people getting 10,20, even 40km baselines. Something must be wrong?
Will.
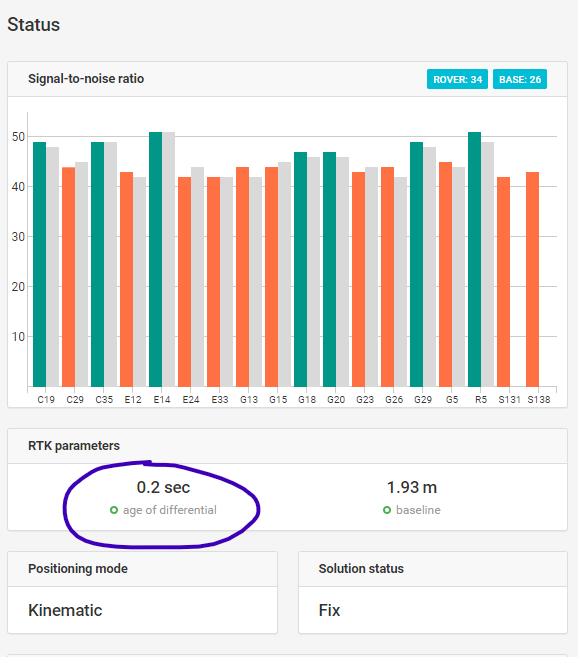
Maybe try a different frequency ,as interference can cause the issue ., What is the correction time on the main display?
1 Like
Curious, can LoRa work over about 5 to 10km over rolling hills, trees etc. without a straight line of site? Or is straight line of site “mandatory”? (Isn’t max 8km?)
I.e. set base up on a published benchmark monument. Enter known lat long coordinates and elevation (ellipsoidal height correct? Not orthometric correct? I have both for benchmark).
Survey 5-10km away with rover.
I typically work much shorter distances in line of site, so never tried the above scenario.
I will try a different frequency, there wouldn’t be a correction time if the solution is single no?
Hi David, so I tried other frequencies, also tried swapping base and rover roles. I can get no further than 500m baseline (line of sight, I can see the Base). At around 500m base corrections drop out, rover goes to single solution with 0.0 sec age of differential. Will.
Correct.
can you post screenshots of the correction pages of your base and rover?
Hi Will,
Please also share the Simple system report from both units. It’ll help me to check all the settings on the units. You can post the reports here or send them via support@emlid.com. You can find the Simple system report on the Settings page of the ReachView app.
Base
Simple system report
app version: 2.24.2-r0
'wifi_status, interface: wlan0':
- wifi_mode: ap
- access_point:
band: bg
channel: 1
password: null
ip: 192.168.42.1
is_added: true
is_connected: true
mac_address: 6C:21:A2:8F:80:7C
security: wpa-psk
ssid: ReachRS2_Base:21:55
uuid: f72a9074-89e2-4e0b-b363-ed7b3f4caf94
base mode:
base coordinates:
accumulation: 2.0
antenna offset:
east: '0'
north: '0'
up: '0'
coordinates:
- 0
- 0
- 0
format: llh
mode: single-and-hold
output:
air_rate: 9.1099999999999994
enabled: true
frequency: 922800
io_type: lora
output_power: 20.0
rtcm3 messages:
'1006':
enabled: true
frequency: 0.10000000000000001
'1074':
enabled: true
frequency: 1.0
'1084':
enabled: true
frequency: 1.0
'1094':
enabled: true
frequency: 1.0
'1124':
enabled: true
frequency: 1.0
bluetooth:
discoverable: false
enabled: false
pin: '***'
constraints:
lora:
frequency:
- - 918100
- 925900
correction input:
input2:
baud_rate: 38400
device: UART
enabled: false
io_type: serial
send_position_to_base: false
device:
night_mode: false
power_on_bottom_connector: false
privacy_policy_accepted: true
usage_analysis_accepted: true
logging:
base:
format: RTCM3
started: true
correction:
format: RTCM3
started: true
debug: false
interval: 24
overwrite: true
raw:
format: UBX
started: true
solution:
format: LLH
started: true
lora:
air rate: 9.1099999999999994
frequency: 922800
output power: 20.0
network:
tcp_over_modem: false
position output:
output1:
baud_rate: 38400
device: UART
enabled: false
format: ERB
io_type: serial
output2:
baud_rate: 38400
device: UART
enabled: false
format: ERB
io_type: serial
rtk settings:
elevation mask angle: 15
glonass ar mode: 'off'
gps ar mode: fix-and-hold
max horizontal acceleration: 1.0
max vertical acceleration: 1.0
positioning mode: kinematic
positioning systems:
compass: true
galileo: true
glonass: true
gps: true
qzss: true
snr mask: 35
update rate: 1
sound:
mute: false
volume: 100
Rover
Simple system report
app version: 2.24.2-r0
'wifi_status, interface: wlan0':
- wifi_mode: ap
- access_point:
band: bg
channel: 1
password: null
ip: 192.168.42.1
is_added: true
is_connected: true
mac_address: 6C:21:A2:BF:70:26
security: wpa-psk
ssid: ReachRS2_Rover:E7:BC
uuid: c353127e-6100-4108-86fa-3bcf7bf30020
base mode:
base coordinates:
accumulation: 2.0
antenna offset:
east: '0'
north: '0'
up: '0'
coordinates:
- 0
- 0
- 0
format: llh
mode: single-and-hold
output:
baud_rate: 38400
device: UART
enabled: false
io_type: serial
rtcm3 messages:
'1006':
enabled: true
frequency: 0.10000000000000001
'1074':
enabled: true
frequency: 1.0
'1084':
enabled: true
frequency: 1.0
'1094':
enabled: false
frequency: 1.0
'1124':
enabled: false
frequency: 1.0
bluetooth:
discoverable: true
enabled: true
pin: '***'
constraints:
lora:
frequency:
- - 918100
- 925900
correction input:
input2:
air_rate: 9.1099999999999994
enabled: true
frequency: 922800
io_type: lora
output_power: 20.0
send_position_to_base: false
device:
night_mode: false
power_on_bottom_connector: false
privacy_policy_accepted: true
usage_analysis_accepted: true
logging:
base:
format: RTCM3
started: true
correction:
format: RTCM3
started: true
debug: false
interval: 24
overwrite: true
raw:
format: UBX
started: true
solution:
format: LLH
started: true
lora:
air rate: 9.1099999999999994
frequency: 922800
output power: 20.0
network:
tcp_over_modem: false
position output:
output1:
baud_rate: 38400
device: UART
enabled: false
format: ERB
io_type: serial
output2:
baud_rate: 38400
device: UART
enabled: false
format: ERB
io_type: serial
rtk settings:
elevation mask angle: 15
glonass ar mode: 'off'
gps ar mode: fix-and-hold
max horizontal acceleration: 1.0
max vertical acceleration: 1.0
positioning mode: kinematic
positioning systems:
compass: true
galileo: true
glonass: true
gps: true
qzss: true
snr mask: 35
update rate: 5
sound:
mute: false
volume: 100
Get Outlook for iOS
Clear line of sight Lora has massive range
Trying to propagate out of trees and valleys is very poor, put your base on the highest clearest point possible. I have tried a 1W external Lora, it barely made a difference fighting trees.
Raising the antenna improved performance in all cases.
2 Likes
any further comments?
Its clear line of sight on the flattest country you will find!
1 Like
Hi Will,
Sorry for the delay. The settings on both units look correct.
Sometimes the issue with the range might happen because the radio channel selected for LoRa is occupied for some other purposes as well. I suggest changing the LoRa frequency bands to check if it helps.
You can set up the frequency at the highest allowed value in your area. If the range is not sufficient, go down with the 1-2 MHz steps until you find the frequency that works best for your area.
Please make sure that the LoRa radio antenna is firmly attached to the housing of the unit.
1 Like
I’ve tried lots of radio frequencies with same result, i think this is an internal issue with one or both of the radios.
How many constellations do you have activated?
try reversing your setup. Make your base into your rover and your rover into a base. that might help determine if there is a hardware issue.
Also, inspect your connections. Make sure the center pin of the radio antenna is not bent or broken on either.
Hi Will,
Thanks for your patience.
Usually, in similar cases, the main cause of the issue is either inappropriate environmental conditions or incorrect hardware setup. Hardware malfunctioning of LoRa radio is less probable.
Surveying in challenging conditions like in a forest or in extreme terrain more likely corrupts the line of sight. So, the LoRa radio range will be lower. To increase the distance, you may try to put the receivers higher above the ground. It can reduce the number of obstacles and may provide a line of sight between the receivers.
If your receivers are set up properly, but there are still issues with the LoRa range, we need to get the logs from your Reach to understand what could cause this behavior. Please do the following test:
- place the rover within approximately 3 meters from the base
- configure RTK-link via LoRa
- turn on raw data log and base corrections log on the base
- turn on raw data log, base corrections log, and position log on the rover
- start increasing the baseline by moving away with the rover
- stop the logging right after the solution goes to Single
- export the logs and share them with me via support@emlid.com
These data might help us to check whether there’s a hardware-related issue with your devices.
2 Likes
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.