



Estou com problemas para conseguir obter acurácia em meus projetos, a precisão esta boa porem a acuracia comparada aos gcp no solo esta ficando na casa de 80cm a 1m.
utilizo reach modulo como base reach rs como rover para coleta dos gcp e reach m embarcado em um asa fixa, o asa fixa voa ha 14m/s. camera sony a6000 com assincronismo pela sapata do flash modelo seagull. a base utilizada no levantamento dos gcp é a mesma do uav e os pontos coletados no mesmo dia e pos-processados.
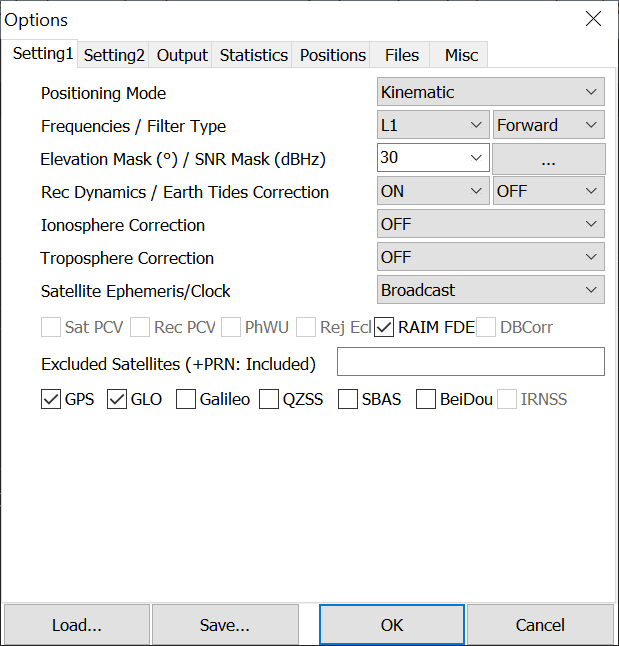
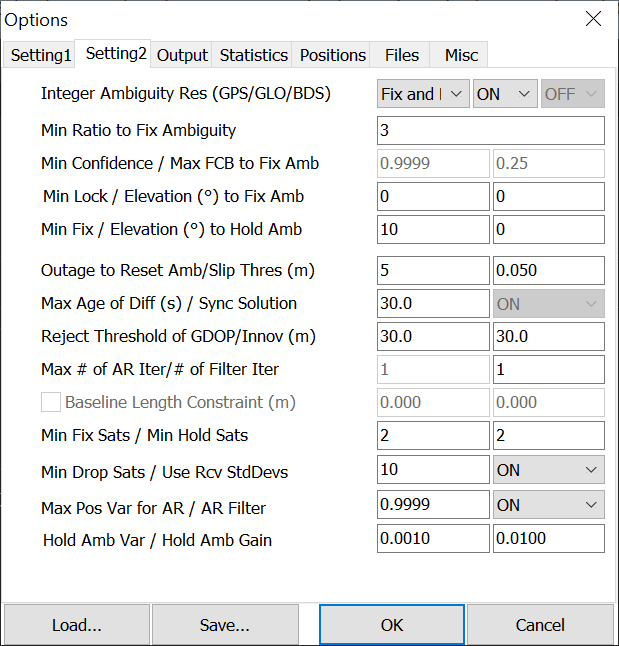
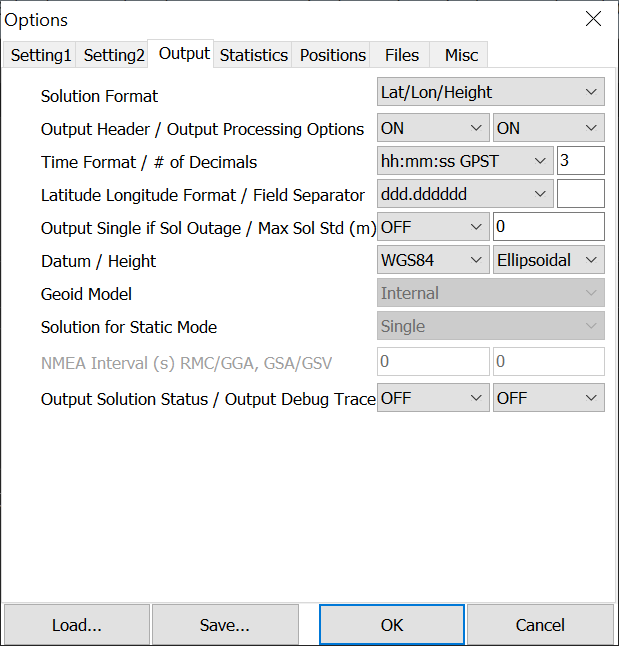
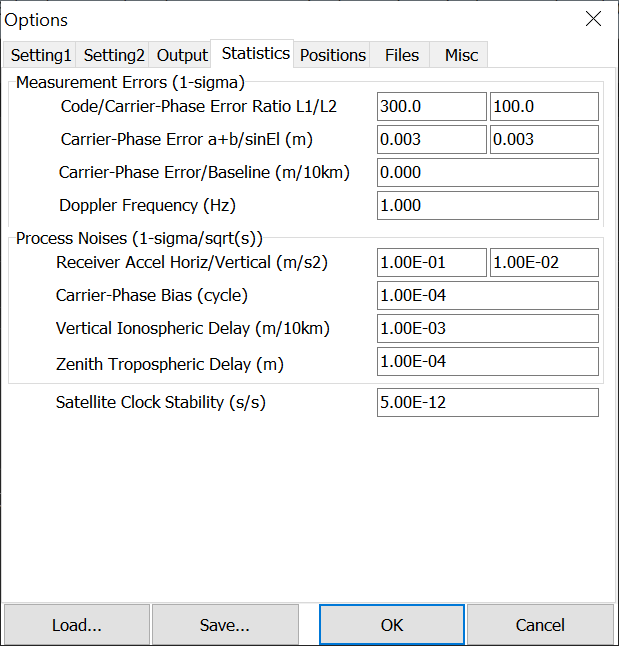
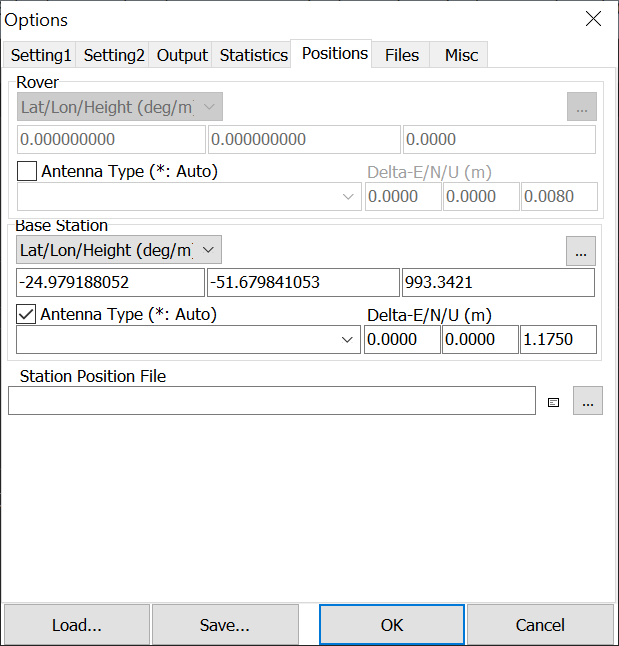
coordenadas de base iguais, segue relatorio do metashape e as paginas de configuracao do rtklib, instalação do reach m no uav
energia para o reach m proveniente de um bec castle compartilhado com radio rdf900 porem com filtros de ferrita, plano de aterramento da antena de 10cm construído com pcb!
relatorio sem os pontos de controle ativos :relatorio.pdf (4.0 MB)
Relatorio com pontos de controle relatorio.pdf (3.1 MB) ![ptkpost1|527x550]
link para os dados https://1drv.ms/u/s!AgTCVcTndvUrgbwAI5NElcZcUb5oJA?e=iUawcP

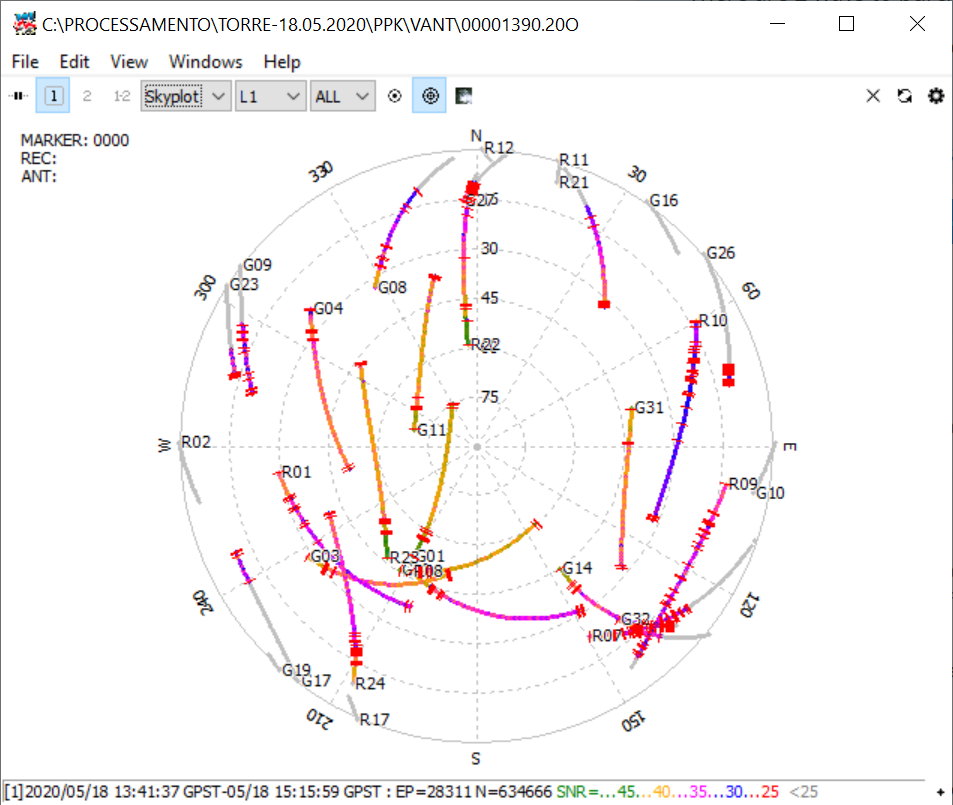



Olá, obrigado por todas as informações.
Eu refiz o processamento dos seus pontos estáticos e todos ficaram fixos e as coordenadas são bem parecidas (~5cm dif)!
Considerei altura da base como 1.175 e dos moveis 1.46
Nestas alturas já considerou o offset do Reach RS/RS+?
21.5mm para o adaptador
67mm para o centro de fase
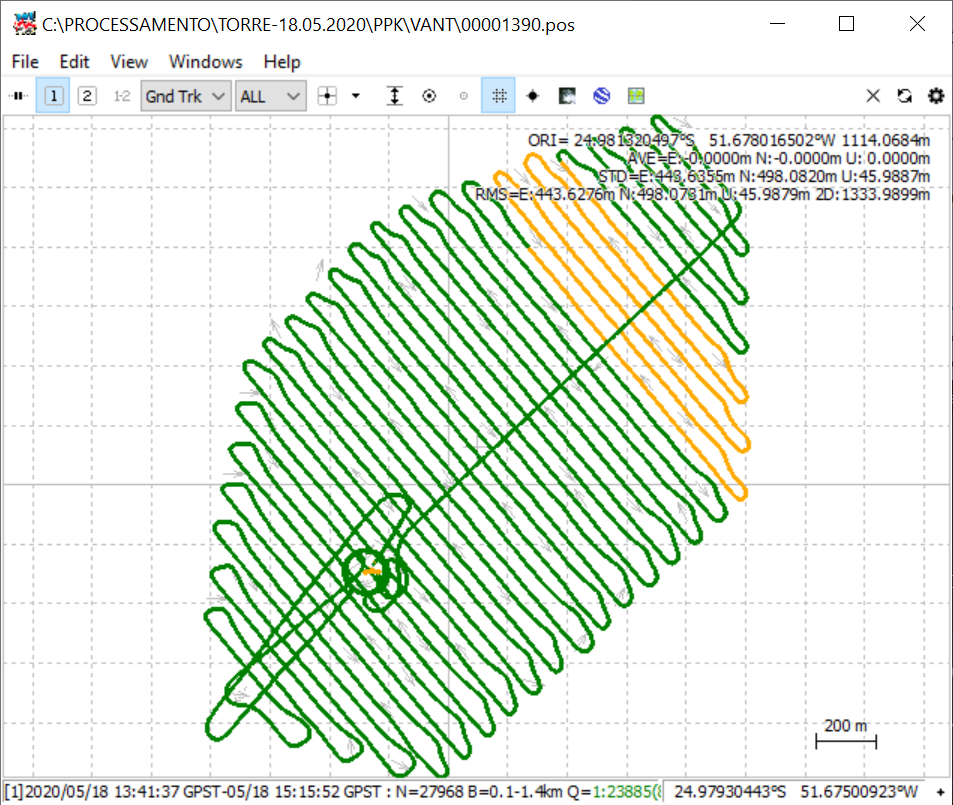
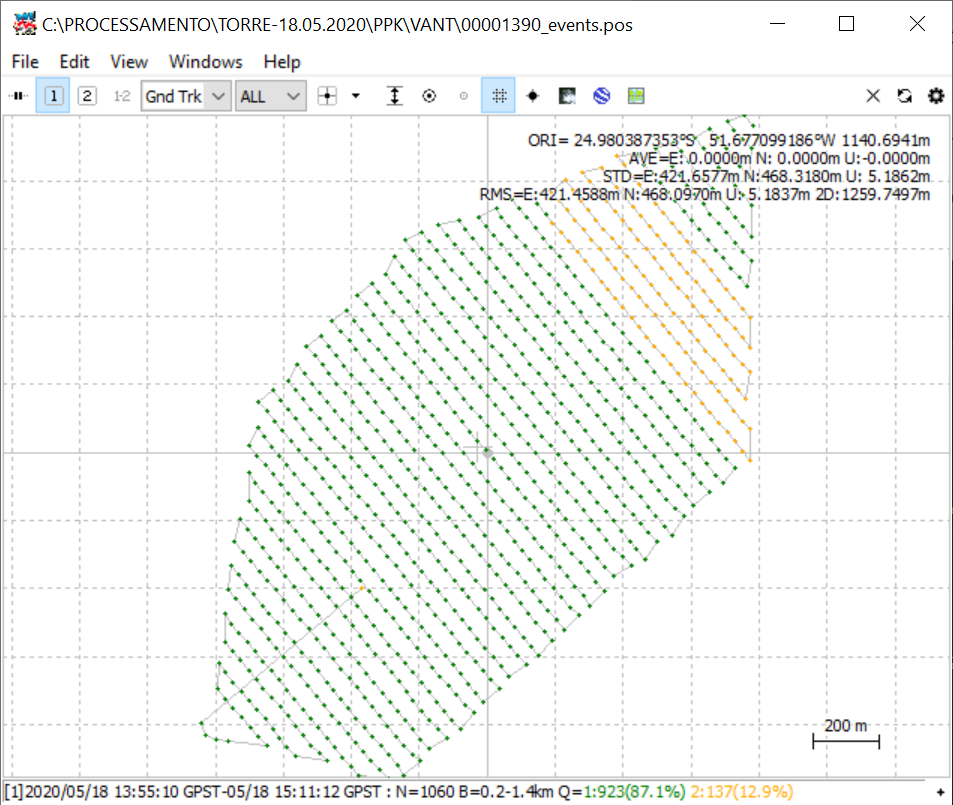
O que notei e que os pontos utilizados está bem abaixo da area em que as linhas de voo não estão fixas.
No processamento da base com o M+, vi que deixou em branco a altura da antena M+. Seria interessante ali colocar os offsets em relação ao centro ótico da câmera. Poderia melhorar os resultados significativamente!
Você tem algum outro levantamento? Que ficou todo fixo?
Os pontos coletados para gcp já estão com os valores corretos, medido na base do reach, foi coletado com tripé e base nivelaste
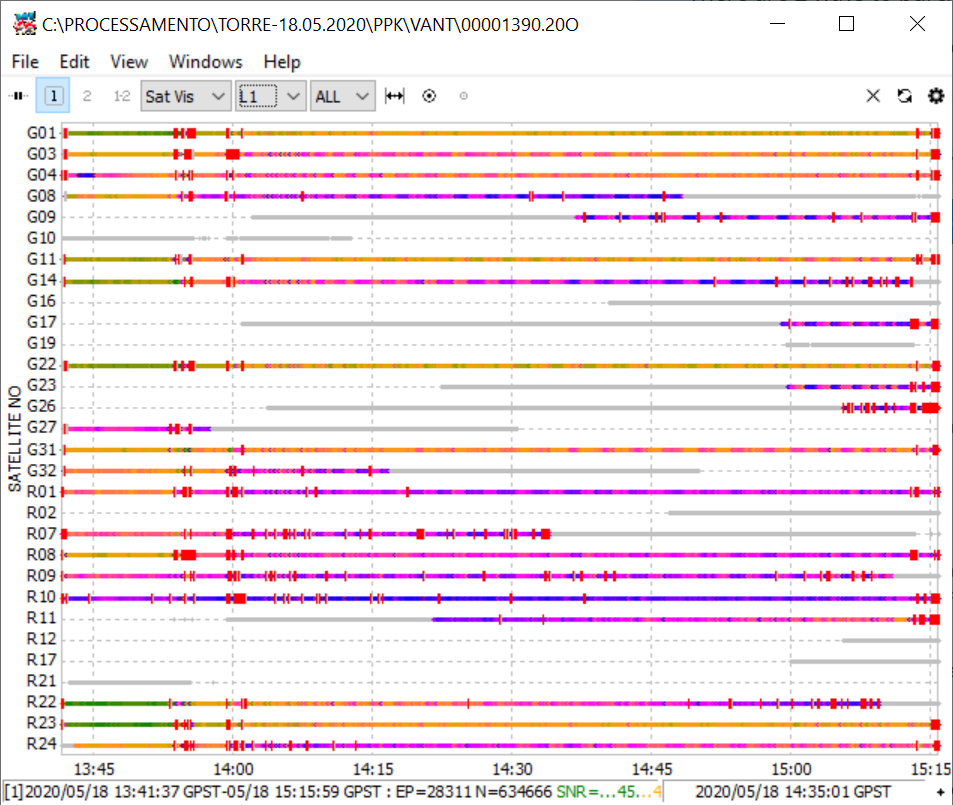
Os offsets do vant foram colocados no processamento pelo metashape, pois tem um deslocamento lateral entre a câmera e a antena, e como os sentidos das linhas São opostos, ou seja o vante vai e vem por elas, se colocar esse offset pelo rtklib acredito que ficaria errado, esse voo foi o que obtive melhor qualidade. Estou tendo problema para fixar os dados após as curvas com o asa fixa pois o mesmo faz curva em 45 graus acarretando em perda de algums satélites, acredito eu que seja por isso as soluções flutuantes. Porém o maior problema ao meu ver seria esse deslocamento nas coordenadas xy pois o z se calibre com um ponto de apoio, consegui fixar o voo todo porém com uma máscara de elevação baixa 10graus então preferi utilizar esse com os pontos flutuantes, pois acredito que o resultado seria mais acurado.
O Voo que fixou com máscara de 10° você tentou processar e ver a qualidade? Questiono pois o representante do Brasil, Guandalini comercializa o Kit PPK que utiliza o M+ e tem funcionado bastante bem, nos check points o X e Y ficam bem legais, geralmente abaixo de ~5cm. O Z só melhora ao colocar único GCP
Existe alguma possibilidade de elevar a antena alguns centímetros, por uma haste?
Será que isso não ajudaria nas curvas?
Ela está fixada na tampa no caso, teria que fixa-la em algum outro lugar para poder colocar uma haste, mas poderia tentar, você acredita que com uma máscara de 10 os dados seriam confiáveis?, pois o Incra exige no mínimo 15
Olá, a única informação que encontrei a respeito, foi na segunda edição da norma do Incra, porém mencionado para levantamento de vértices. Atualmente já está publicada a terceira edição e não tem estes questionamentos.
Se pensar em manter os padrões da anterior, já que não tem isto na última edição publicada, lá não tem informação para como devem ser realizados os mapeamentos aéreos, a única coisa é um documento publicado exigindo 20 pontos de verificação
This topic was automatically closed after 100 days. New replies are no longer allowed.