After finish the RTK integration between the REACH M+ and Pixawk Mini Cube I realized that the airspeed sensor stops working. I tested many configurations and detect what is happening when connected the JST-GH 6p-6p cable from port S1 to GPS2 port in Pixhawk. The Airspeed Sensor is installed in port I2C 2, so I think It is deactivated when the GPS 2 port is activated, taking into account that it port that 2 pins that received the same description I2C 2, You can review the following pixhawk Cube scheme.
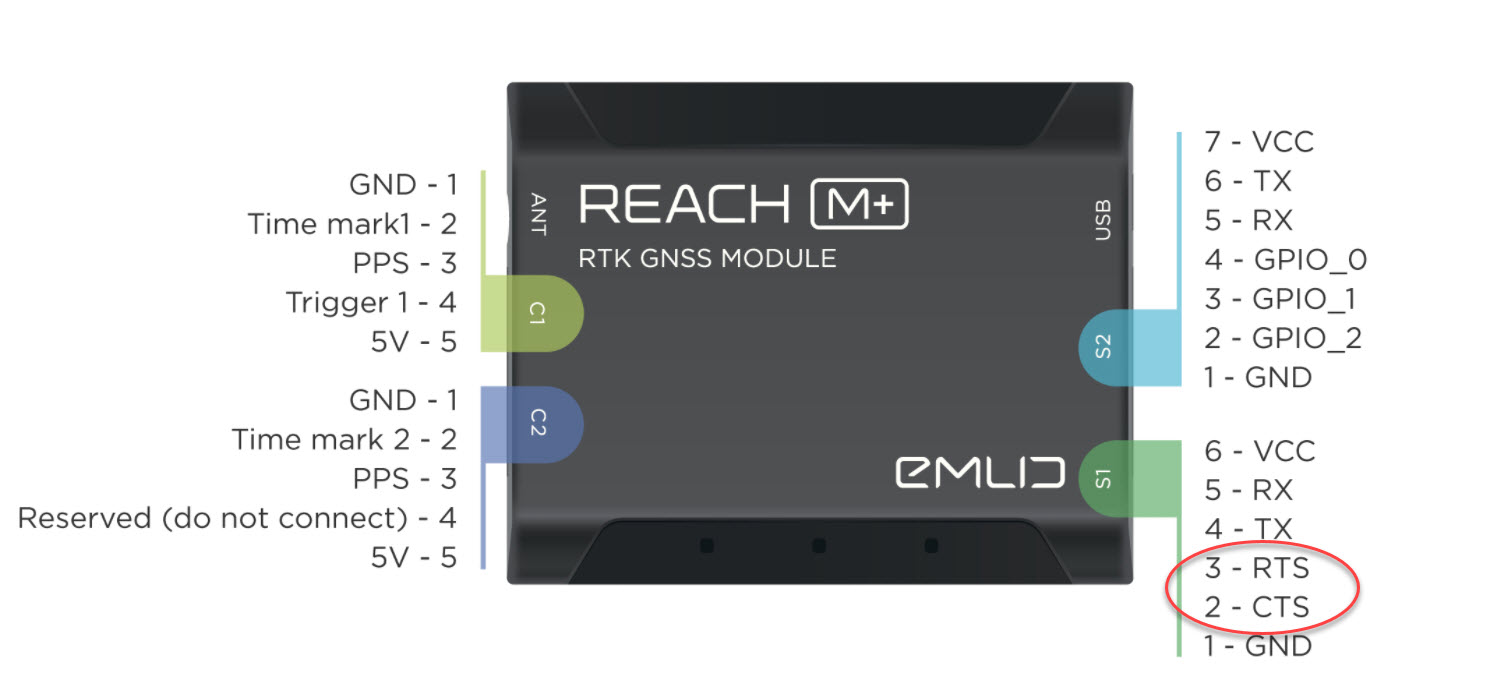
My question is: Can I cancel the wire of RTS and CTS in the Reach M+ connection without affect the RTK performance?, or need to change some parameters in Pixhawk?
To get the communication over UART working, you only need RX, TX, and GND pins connected. VCC pin is optional: it should be connected if you want Reach M+ to be powered from PixHawk. We usually recommend powering M+ from a separate more stable power source since sometimes PixHawk may not provide enough power for M+.
I powered the reach module by independent BEC direct from the main battery, using the power and GND pins in S1 port. But I not include the GND pins in the pixhawk connection. But it works, maybe the RTS or CTS works as GND, what do you think?. I will update my wire.
That’s a good idea to power Reach from an independent BEC. However, it is also important to provide a GND connection for UART. I think you can use GND from the S1 port for UART and connect BEC to VCC and GND pins of any other M+ ports (C1, C2, or S2).