



Hi all I’m new to building drones and looking for some advice. I’ve been working as a surveyor for the past 7 years and decided I wanted to build my own fixed wing for mapping. I’m wanting to run a Pixhawk 2.1 black cube with the standard carrier board w/ ardupilot, Emlid Reach M2, and a Foxtech Map 02 camera. The Pixhawk is 3.3V, the M2 is 5.5V, the Foxtech is 8.4V, and the motor I plan to use needs an 11.1V 3S battery. Are the different voltage requirements going to be an issue? I don’t what to run everything on different power sources. I have another question. Is it okay to just use the M2 as the only GPS on the drone or do I need another? I apologize for these amateur questions, but I’m learning. Thanks in advance!
Hi Andrew!
Welcome to our community forum.
Reach M2 can be powered using drone’s battery only. Pixhawk Cube has a GPS1 and GPS2 JST-ports to connect and power M2.
Regarding the connection, you might find useful this Adrupilot’s page with Cube’s pinout, Pixhawk’s quickstart on wiring, Foxtech Map 02 wiring, and our guide on M2’s integration with Pixhawk.
Also, it is possible to use Reach M2 as the only GNSS receiver for Pixhawk. Though you need to take into consideration that a single M2 receiver in non-RTK mode will provide you with meter-level accuracy only.
However, according to the Foxtech’s camera description, it requires external 8.4V power supply. You need to connect it to battery somehow. Unfortunately, I’m unable to provide you with a ready solution. I would recommend contacting the manufacturer on that subject.
Thanks for the advice. I got everything working except when I connect the M2 to the Pixhawk nothing happens, no lights come on, nothing. If I plug it into the wall it comes on and connects to Reachview just fine. What should I do?
Hi Andrew!
How do you power the Reach M2 receiver on the drone? Can you share a picture of your setup?
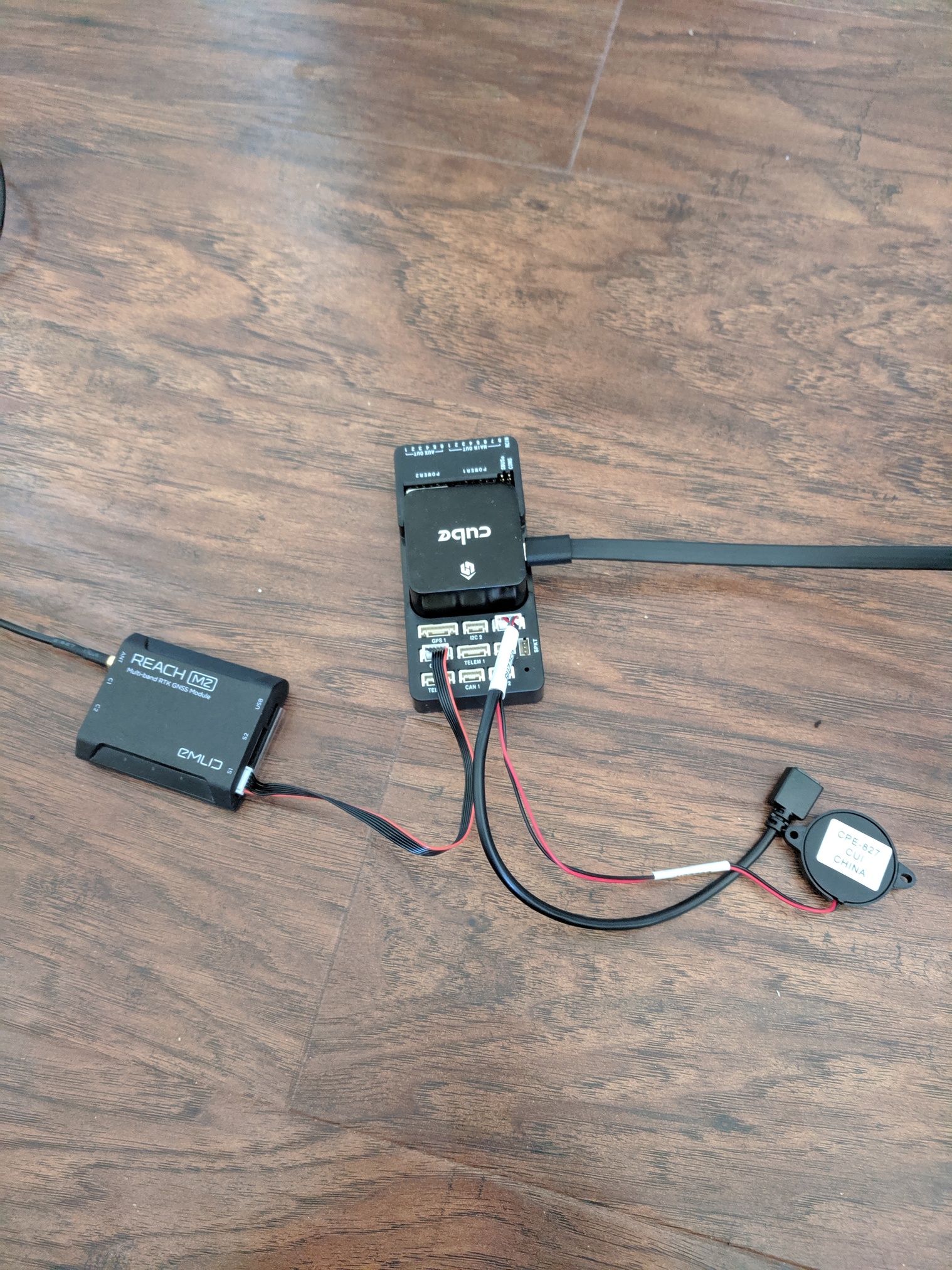
I haven’t put it in my wing yet. Here is my setup plugged into the wall outlet. The buzzer works when I plug it in, but not the GPS. IMG_20200721_163840|412x550
{kind=link}
Hi Andrew,
Looks like, Reach M2 is not powered. Its LEDs are off. In some cases, Pixhawk may not provide enough power via JST ports.
May I ask you to try connecting Reach M2 to a separate power source to make sure it’s working fine? Also, to avoid damaging the M2, connect RX, TX and GND pins only. You can find Reach M2 pinout here.
Let me know if it works.
If I power the M2 over the USB port from a wall outlet it work perfectly.
Hi Andrew,
The M2 didn’t provide data to Pixhawk due to the wrong cable. At the moment, Reach M2’s ground pin is connected to the Cube’s 5V. The connection is reversed. To make it work you need to use a different cable, like this one.
However, even if you use the right straight cable, Pixhawk might not provide enough power via the GPS port for M2 to operate. You will need to power it via S1’s 5V pin or via a micro-USB port using a separate source.
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.