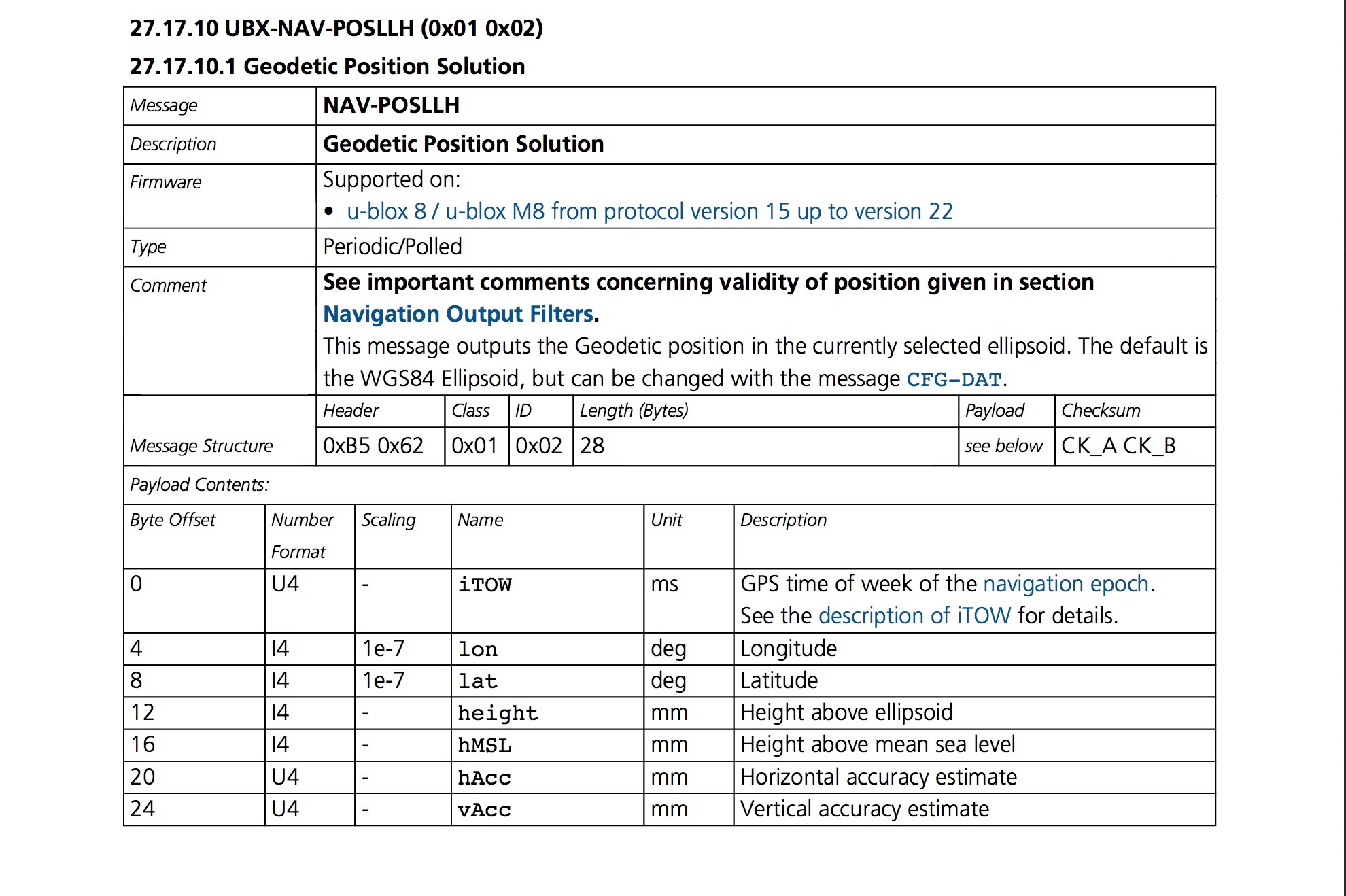
When configuring the rover solution output stream, is it correct to assume that the available options (llh, xyz, enu, nema) can be parsed per the documentation on page 103 of the RTKLIB manual which describes how this data is logged to the B.1 Positioning Solution File? There aren’t any specific details about how the stream differs when its not being saved to an actual file, but I think the repetitive rows (solution body) would be the portion of interest to parse (just skip the headers). Is this correct? Are there any code examples available for parsing the binary solution data? I’m specifically interested in the base to rover vector in the ENU frame.
Can the base also provide a solution or is the output only available on the rover device?
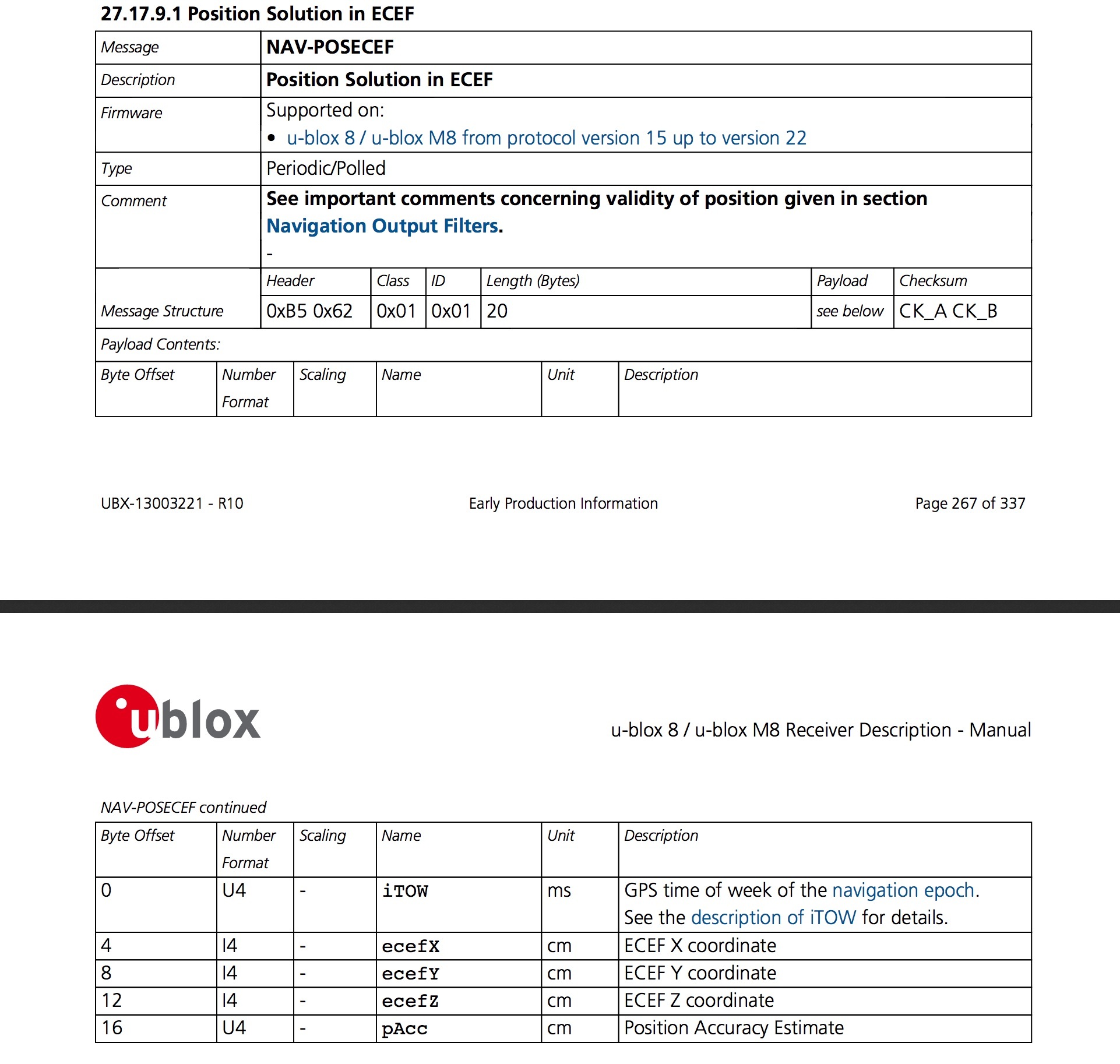
Have been searching high and low for info about the structure of the xyz output with little luck. Trying to get xyz data directly from rtklib to avoid having to due double float math on the micro controller converting formats. tinygps++ works great for parsing out the nmea output but really after the xyz.
So there is nothing in the the rtklib documentation that spells out the how to parse the data output. No one at Emlid has any insight into this? The data output really is of no use if it can’t be parsed out into variables. Ublox explains in detail how its data stream is configured which makes parsing rather easy. The rtklib manual doesn’t cover any of this.
Really of no use. Im intested in the xyz output to avoid doing the calculations from other sources when they have already been accomplished on Reach. understanding how to read the output is different than parsing into variables.