Do I need to buy the following control card or are the tilt and roll automatically calculated through Navio 2 board’s IMU?
What option do I need to select in Mission Planner option list?
Here are the options available : Servo / 3DR Solo / Alexmos Serial / Storm32 Mavlink / Storm32 Serial
With your setup, you need the storm32 (or other) card.
Direct control by the flight card is only for servo gimbal.
As your HK MiniStorm32 is not genuine Storm32 card, you may have to use the Servo option from Mission Planner. Storm32 serial needs to use UART (no such plug on your HK card).
Latest genuine Storm32 card are with a SPI Bus for gimbal sensor, with less errors than i2c…
“Servo” is for “PWM input”. Orders from the Flight card are sent to the Gimbal card via PWM. There is one Servo slot needed for each gimball fonction (Tilt/Roll/…).
Via sBus or UART or serial, you need only one line to send your orders…
Check with Emlid if Navio UART can be used to gimbal control. At least you need to set the UART speed at 115200 (default is 57600) to communicate with Storm32 UART (115200 by the doc) and config UART to control gimbal with Mission Planner.
How did it go?
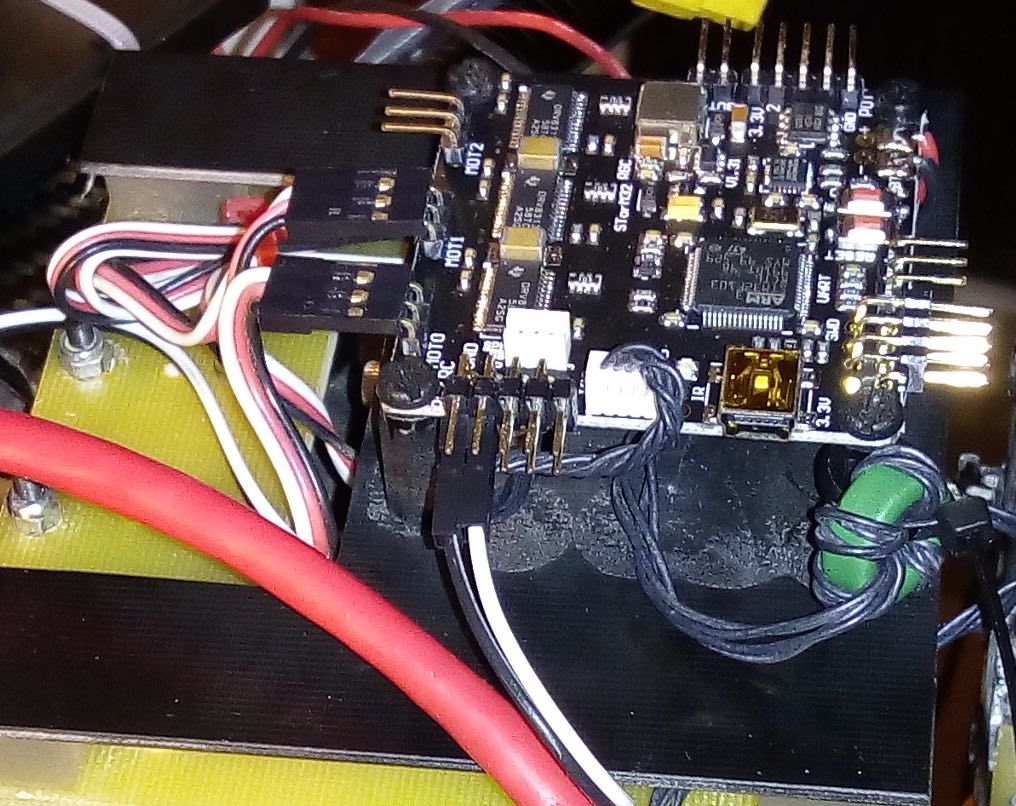
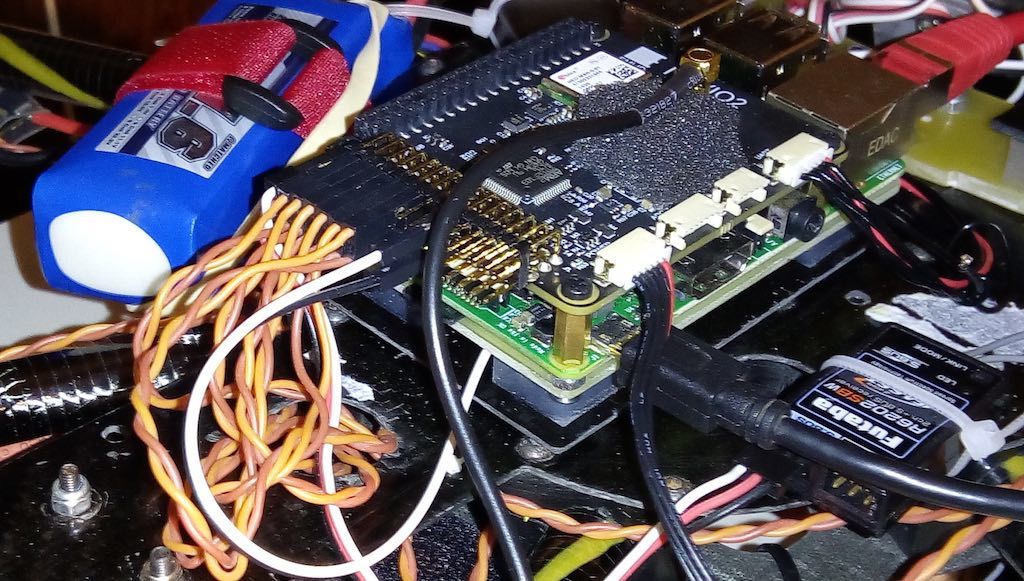
Would fore sure appreciate any picture of your wiring
If I understand well the pWm inputs are just there for trimming the camera right ?
Concerning the gopro how do you get the video stream in flight : through “classical” 5,8 ghz TX or wifI stream?
Guillaume
PWM out is for trimming camera. I just use manual Tilt control from the RC tx and Automatic Tilt Control for ROI. You can also use PWM out for camera control (shutter, zoom…).
Hello Marc, I just received my Storm32 BGC and it just doesn’t exactly look the same as yours. Indeed, my connectors are not soldered already and I had to make it myself (was a bit tricky for the I2C pins which are in different order between MPU and and the board)
Still, I could not make it work as I cannot connect through the GUI app.
I wonder if I haven’t get a bad chinese copy… Could you please let me know where you have ordered yours? Thanks
Guillaume
Ok, just ordered it from goodluckbuy. Mine was a 1.3
I finally got to find the proper GUI version but the motors don’t initialize (“I2C error”)
I will try from your 1.31 version, hopefully it works better.
My firmware version is 0.82, and I miss a USB TLL adapter to flash it. Ordered it as well…
My gimbal is working really well “manually” (meaning with my RC input controls to variate pitch and roll), but I did not get how to initiate a mavlink connection between Navio 2 (running ArduCopter 3.4 rc 4) and my Storm32BCG
I understand this can be done through the UART ports (uart from Navio 2 connected using the right wires to the 3 pins UART of Storm32)
I understand this can only be done through usage of secondary telemetry /dev/ttyAMA0 which I am unfortunately already using for a companion computer on 127.0.0.1 address.
Is there any mean to use Mavlink instructions (setting ROI, rotate, etc…) without using this telemetry link?
My UART port is used with telemetry radio. So I use servo lines to communicate with StorM32 (only for pitch control).
ROI control is working and ok (tilt follow).
If you want to use UART Mavlink, you have to set UART serial at 115200 or set Storm32 serial speed at 57600. I’m not sure Mavlink is working (there were some problems reported in ardupilot support forum 3.4 rc4).
Thanks Marc, I did exactly as you say and it seems to work fine
I as well estimate PWM servo output to be far more convenient and probably as well more reliable
I have an issue with my gimbal parameters which are probably coming from my PID
I run all configuration steps (Gimbal Configuration tool) + IMU camera calibration + 2nd IMU calibration
My PIDs are the following:
Pitch/Roll damping : 3
Pitch/Roll stability : 4
Pitch/Roll V Motor max : 83
When I power my gimbal, it calibrates fine and I hear the “bips” meaning level is completed
When I manipulate my quad around both axis, the gimbal just seem to work fine by keeping everything at level
BUT…
When I go in flight, after the first flight manoeuvers the gimbal just locks in bottom direction and I can’t do anything with it unless full reset (no reaction upon tilt or roll +/-)
It seems the gimbal might just be overwhelmed by some sensor but I don’t find which one?