



Hi
I work at a remote mine and have recently gotten a Phantom 4 RTK.
It is great and the Emlid NTRIP caster setup was amazingly easy.
We have wifi at the cabins and that is how I connect to the internet but my workflow has historically been to drop of the metal GCPs around the site, send the drone up (the entire site takes 90minutes) and collect GCPs while the drone is flying.
I don’t think I can do this now as the output on my base is set to NTRIP and I need LORA to get corrections to my ROVER. I don’t have access to the internet out in the mine field. Is there any way to get two outputs NTRIP and LORA?
Joe
What coordinate reference system are you using for the base? A network derived point, a single average, a localization (site calibration)? Have you tested without GCP’s? I would consider setting more permanent base points and a network of checkpoints so that you can reset a base point if it gets knocked out. If you return to the same point and manually enter the value you should get all the relative accuracy you need with the P4RTK. Then just have two checkpoints in the field. One on either side of the area being Surveyed. There’s no reason to put down 4 or more “GCP’s” and tag them in processing with an RTK drone… If it is working properly.
3 Likes
normally I’d agree with you but I’m measuring the cut and fill on large flat drying beds, I have permanent points all over the place, but one drying bed is 6ha in size, I’ve found it necessary to drop a fair few points on the bed to keep the accuracy to a sub 10cm.
Its not a big drama, it is a nice to have, used the RTK drone to do 3 flyover the other day and all checkpoints came back accurate less than 1cm average (which I know is partly luck as emlid isn’t that accurate, but still, best results ever).
If you’re not getting 5cm all day with the P4RTK something is wrong. I’m guessing the material is hard to reconstruct. What does you flight config look like?
Happy with all input, its how I improve, so go hard!
I’ve been using just a P4V2 75m flight, 80/80 overall.
Now I have the P4RTK, I havnt done a full site with it yet.
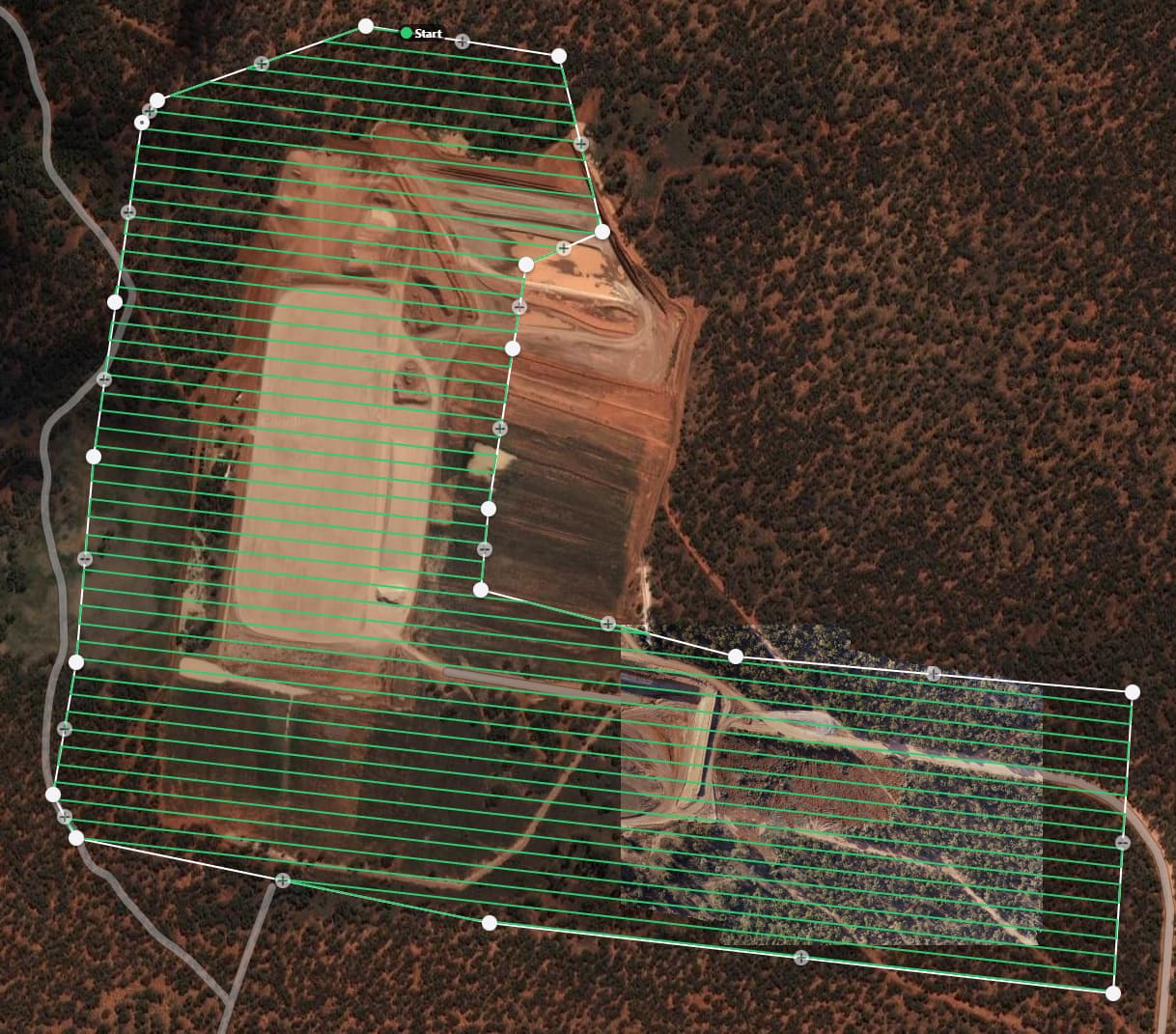
I fly the full site in one flight, then upload the full site with GCPs and then do more focused maps with particular beds or pits that I’m very interested in with only GCPs that are relevent to the area. I realise that there are way too many GCPs for this map, I keep hearing that more than 10 are a waste, but I’ve found that the height of the bed varies too much if you go too long without a GCP and most of the time I do focused maps on the beds anyway.
Flight Path:
Final image with permanent GCPs marked:

Final image with all checkpoints and GCPs used for the flight:

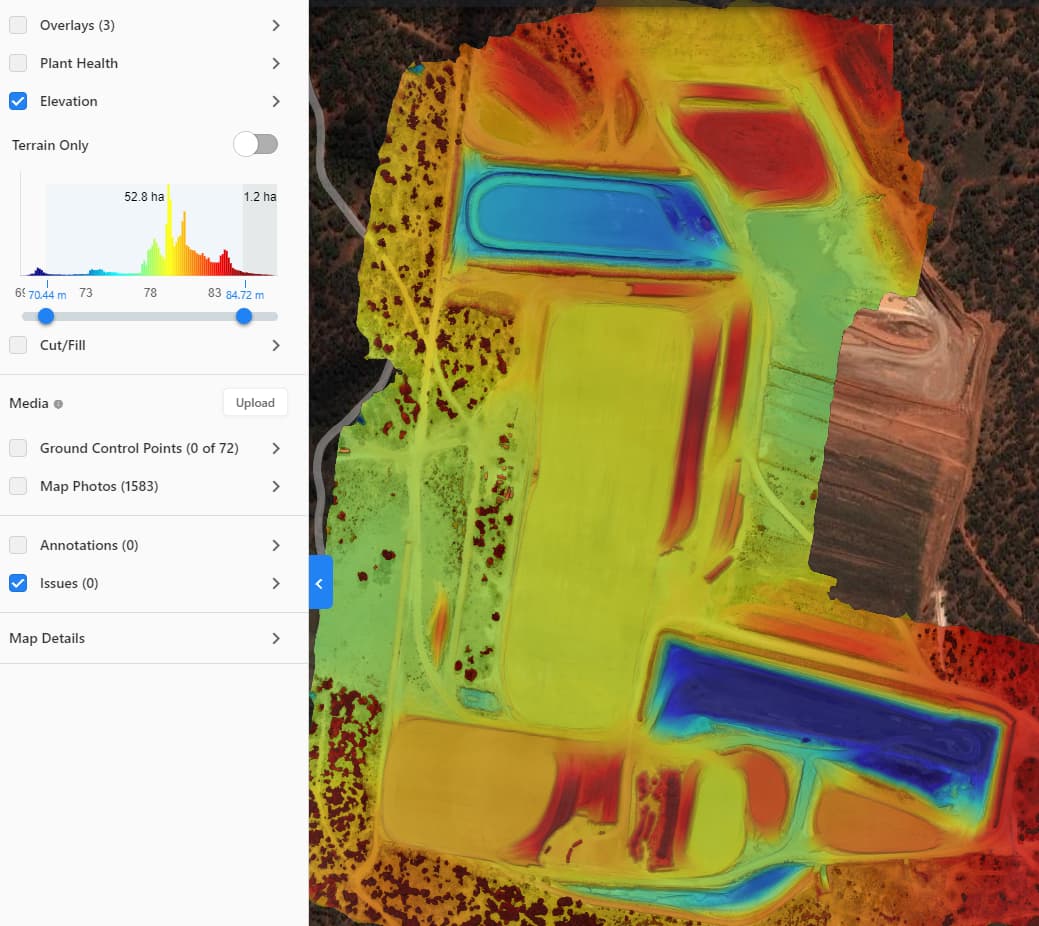
Terrian:
100m diameter circle for scale:

That’s a lot of points. I’m pretty sure I could add about 25 more and not need the drone. In all seriousness though what did you tag in the large open areas that don’t have permanent GCP’s? We got DroneDeploy to give us control markers yet they still can distinguish between a GCP and a Checkpoint.
What did I tag? Just black and white GCP points that I’ve made out of 3mm Mild steel and painted.
They get dropped when I arrive onsite, it takes 20minutes, then I send the drone up and while the drone is flying the whole site, I measure with my RS2.
I need to have certainty of my results, so having hectares without a checkpoint or GCP leaves myself open to quality control questions from the customer.
Now that I have an RTK drone, I’d like to figure out a way to still collect GCPs while the drone is flying, but that would require the base station to output on LORA and NTRIP.
Is there a workaround?
Joe
Hi Joe,
Welcome back to the forum!
You can’t set up two base outputs simultaneously. Instead of this, I have an alternative suggestion that may work for you: Use PPK to collect GCPs. In this case, you don’t need any real-time correction. You can perform Stop & Go with Emlid Studio using your collected logs to determine the coordinates of your GCPs. During this, you can still work with your drone over NTRIP.
1 Like