Okay Emlid what’s going on with the new update? My base station keeps dropping out when using telemetry radio and GPS inject.
Outstanding questions:-
-
Anything on piping reach status into MP yet? Although that’s a bit irelivant as its now always single.
-
Realtime rtkplot with telemetry radio?
-
“like to have” a list of basic setting that archives a fix 90% of the time.
this was an odd one. Rover crashed and had to be reflashed
Hi Andrew,
We have tested the new update in the field yesterday and got reliable fixed solutions. Here is the outcome of the test (pardon my drawing skills):
Are you sure that base coordinates are set to a close location and connections are getting through? Do you see grey bars?
I have a little lost track on the progress of integration performed by you. Could you please let me know if have flashed your pixhawk with firmware that supports ERB protocol? There is no additional action required to see Reach status in MP if it has been recognized as second GPS. What is MP showing as gpsstatus2? If it is 0, Reach has not been recognized, so something is wrong with wiring or settings.
If you can have a second laptop at the field, there is a solution to set rover Reach to output to TCP and connect that laptop to the Wi-Fi network created by the rover. Within approximately 20-30 meters that will give you RTKPLOT connection.
2 Likes
Thanks Igor. I think the criticism of the reach product by me and a good number of others now is due to frustration on not having clear documentation and or tutorial videos. I’ve spent hours trying to get the modules reliable enough so they can be passed on as part of a working drone solution.
Todate I have had to postpone delivery purely because of the reach’s reliability.
Which is costing me far more in time than the price of the drones.
But to answer your question
-
all pixhawks are flashed with your ERB and all the changes to gps2 as per the documentation have been made.
-
at each location either outside my office or in the field the coordinates have been recorded with a Leica a gnss rover so I have two known locations to work with. The locations have been entered into the base station.
-
on both sites I get 15 satalites above 50 and the corresponding base grey bars are almost identical.
-
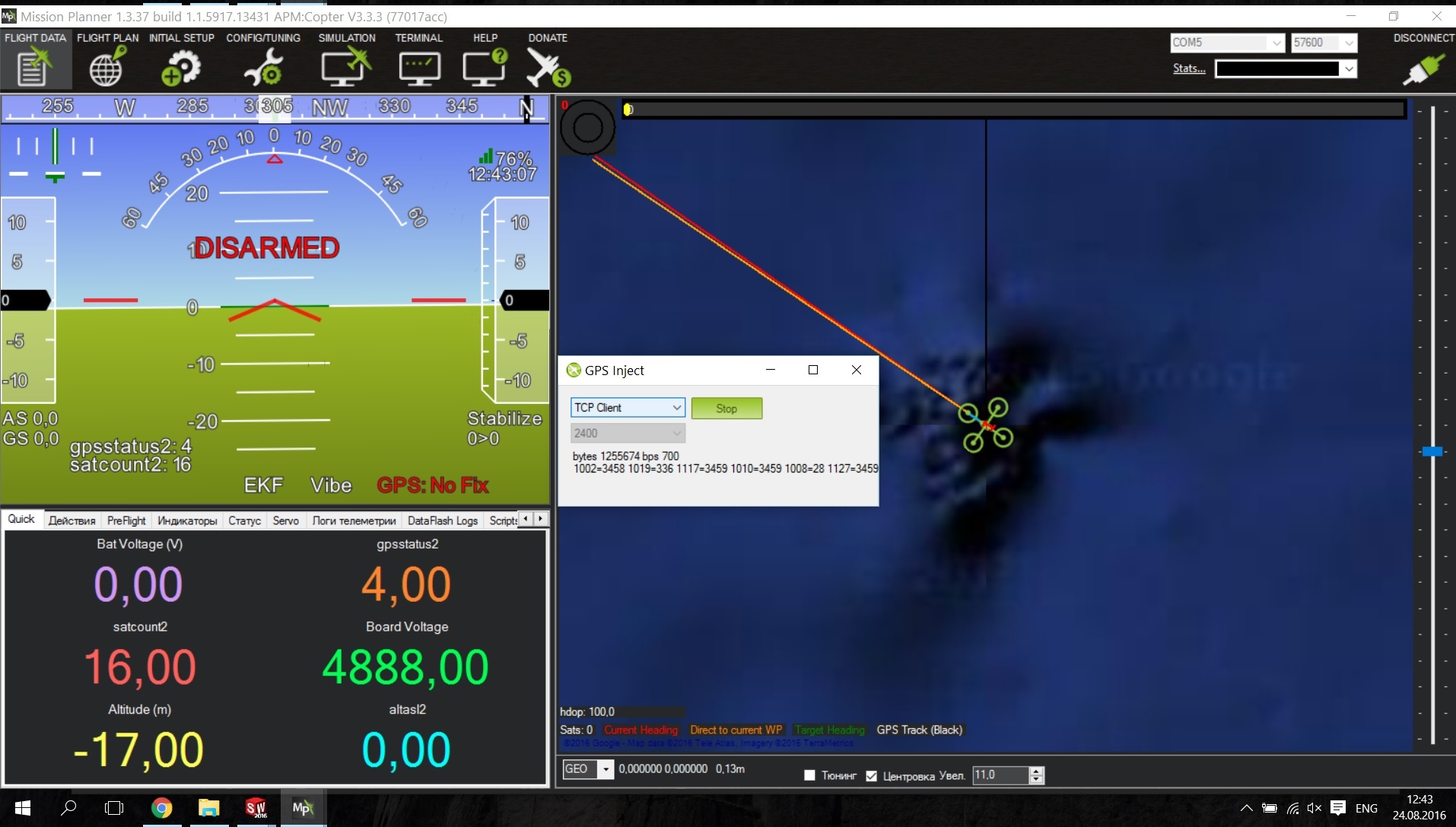
no fix or float. And gpsstate2 in mission planner shows “0”
I can’t tell you how incredibly frustrating this is. All three systems fly perfectly My base station would normally be on a tripod in the field but historically has worked on the odd occasion just sitting on the table as shown in the picture but we now get nothing. So from my perspective the latest firmware has actually made things worse.
Using a second laptop is messy. All we need is the reach status in MP having RTKPLOT working live was just a thought to overcome the problem of MP not showing the status.
Do yourself a favour. List out all the settings of your setup using just telemetry radio (no internet) and put bubble notes next to each one, particularly advanced with a short explanation.
But getting reach status in MP is a must. Otherwise the operator is blind unless they connect to the rover AP prior to take off. But even so the reach status during the mission needs to be monitored.
Obviously I not happy but I have faith. But when you are close or over your delivery date the pressure is intense.
All the best
Andrew
Managing Director
Multirotorcraft Ltd.
Andrew, the status “0” means that there is no comm between Pixhawk and Reach. Have you ever seen status above 0 with previous version of ReachView? Status in MP is the primary indicator of integration working, so there must be something wrong.
Understandable. We will run tests right now to see if nothing is broken in the latest update with Pixhawk integration. If there is no bug on our side, I will try to help to spot the issue. Give me about an hour and I will write back.
No never over “0” with any of the firmware versions. I’ll be in the office shortly and can do screen shots. But screen shots of yours using just telemetry radio would be like for like. I appreciate we are in different locations but that should only require a tweek.
I know that Emlid are working hard to make this the best system but as I said. Documentation should be updated at the same time with explanations. Especially where minor tweaks need to be made.
Like me a lot of your clients are laymen so teach us all how to suck eggs. We are not as smart as you guys.
1 Like
Correction tunneling through the MP does work? So Reach is getting grey bars when connected only to Pixhawk? I am trying to determine if port is working correctly (electrically and on proper baudrate).
That’s a very nice flower 
Grey bars Yes absolutely. Rate is 56 in pixhawk.
Ok, so I went through the steps in tutorial and I can see Reach status in MP.
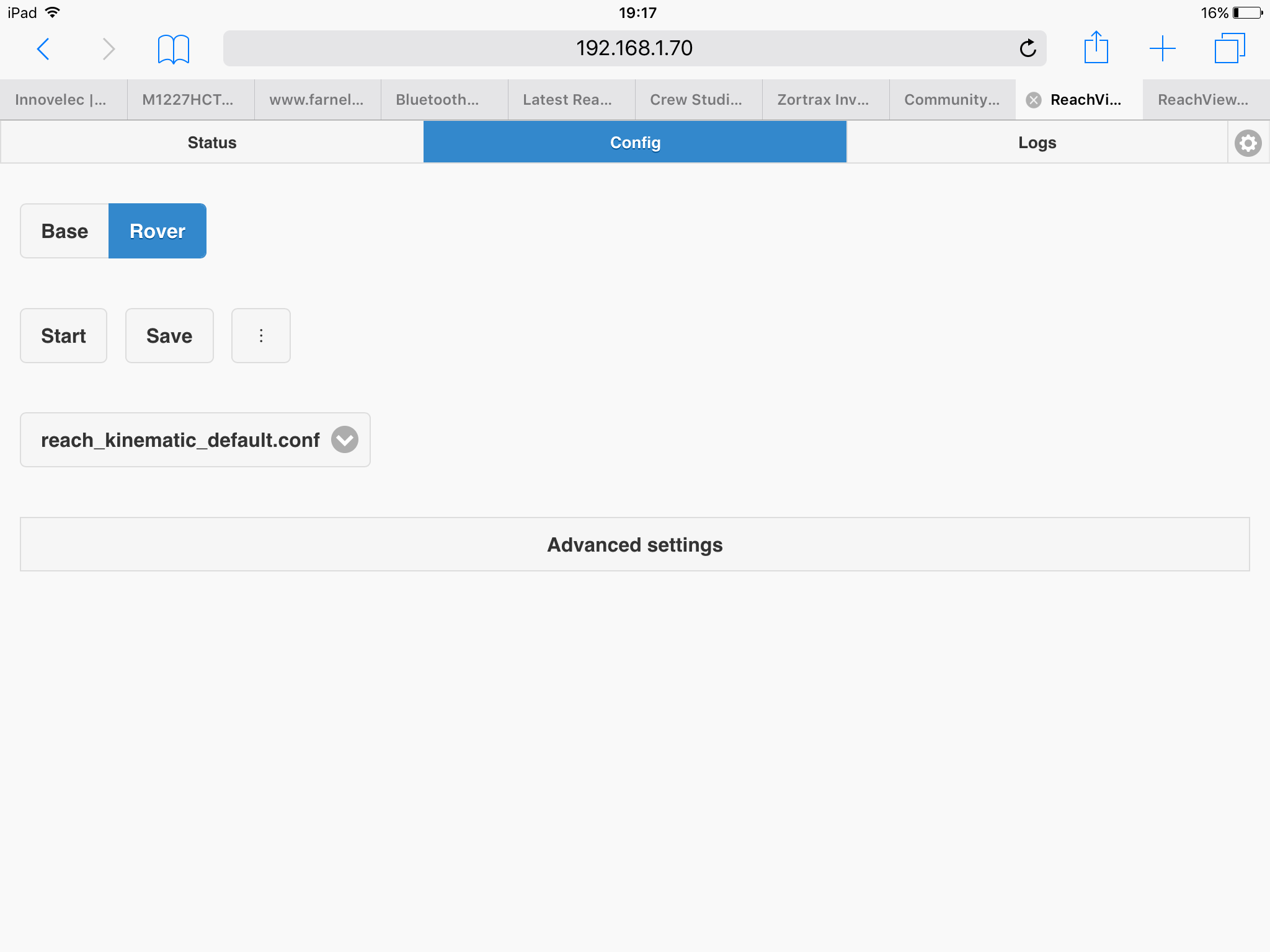
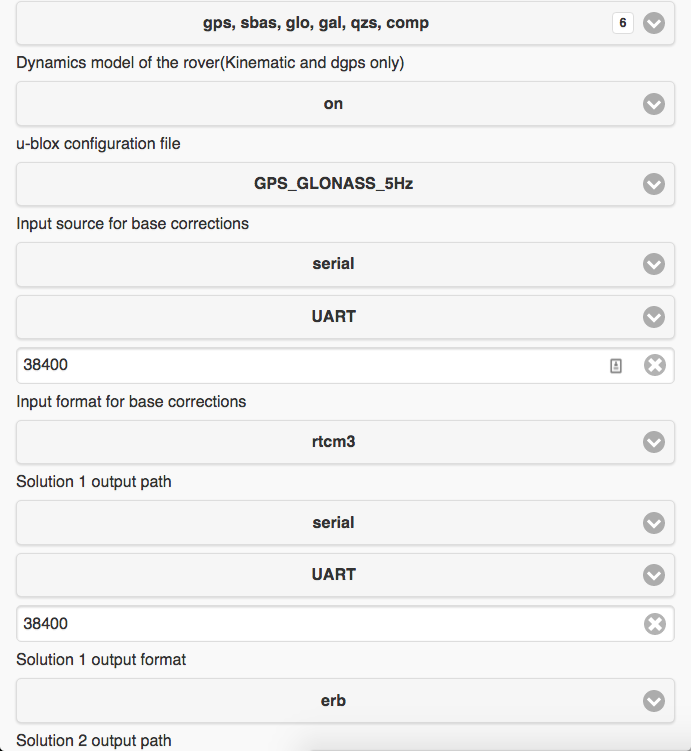
Settings that I used in ReachView:
Also I set SERIAL4_BAUD to 38 (corresponds to 38400) in MP and GPS_TYPE2 to 1 to make it autodetect the protocol.
Now we need to bring your setup to the same state. Are your settings same?
So @igor.vereninov , in a nutshell the reason I didn’t have any info coming back to MP was because I didn’t have serial set on “Solution 1 output path”. That’s great, now I’m getting gpsstate2 3=Single 4=Float and 5=Fix.
I got the maxtena today and popped it on the rover. 2 minutes to fix then it held ± 2cm for about 4 hours. Brilliant. All we need now is to get the telemetry radio sorted so that the base is more reliable. I hope you find something soon.
All the best
Andrew
2 Likes