@Jorge_Cano
Go through the list below and make sure all of your settings are correct.
1.) 3DR radios are paired and have all of the same settings. The best way to check would be to use mission planner> Initial Setup> Optional Hardware> Sik Radios. Make 100% sure everything is matching and nothing is checked off that shouldn’t be.
2.) Unsure all of your connections are correct on the reach itself. The radios should be plugged into the DF13 port on the same side as the USB port on the reach. The other side should be only used for powering the device I believe.
3.) Look over my old post and make sure you settings are correct for everything. I have a picture of how things should be plugged in. Stand alone Reach - RFD900 Config - #4 by Ian
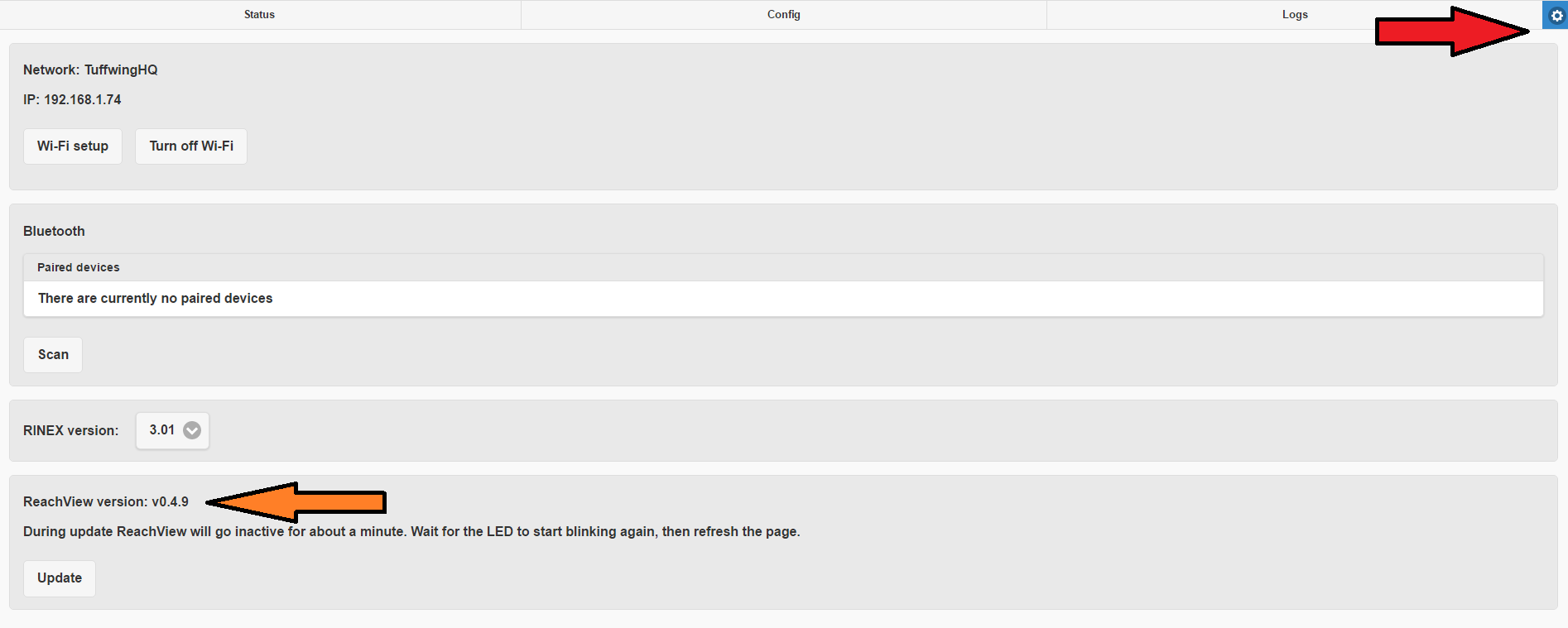
4.) Check to make sure both reach devices are up-to-date (orange arrow) by clicking the gear (red arrow) picture on the top right of the screen when you are connected to the reach device via a web page.