Image and ArduPilot version.
EMLID 2017-03-23 with Arducopter
Detailed problem description. How does observed behavior differ from the expected one?
Nothing is being published to the MAVROS topics. I followed the instructions for setting up ROS/MAVROS and it all seems to work until I try echoing a topic - at which point nothing gets output. I can verify the topics exist but it seems nothing is being published to them
Your step by step actions.
I followed the instructions on:
Another difference is I didn’t get any of the yellow or red writing output to my screen when creating the MAVROS Node.
4)I would post a picture of my setup but it is just the Navio2/Raspi connected to a screen and keyboard. Please let me know if a picture would be helpful in any way.
I would really appreciate any help, this has had me stumped for a while.
Hi,
I think the problem is that you specified incorrect ip or port at which ardupilot is running. It would be great if you can send the contents of /etc/default/ardu[your vehicle] and the command you’re typing when trying to run mavros node.
Hello,
It seems that you’re running mavros node with incorrect port or don’t set stream rate if you don’t use GCS. To get information from the ros topics you need to make sure that you’re specifying correct IP and port when running mavros_node.
You have 127.0.0.1:14650, so the command you need to type should be something like this: rosrun mavros mavros_node _fcu_url:=udp://:14650@
And, if you don’t use your GCS, you should also type rosservice call /mavros/set_stream_rate 0 10 1
If you still don’t get any data, please feel free to ask any questions
If you have arducopter, you should edit /etc/default/arducopter. And if you have arduplane, your choice is /etc/default/arduplane. The same with ardurover. /etc/default/ardupilot is used for custom builds. Thank you for noticing, we’ll fix the docs.
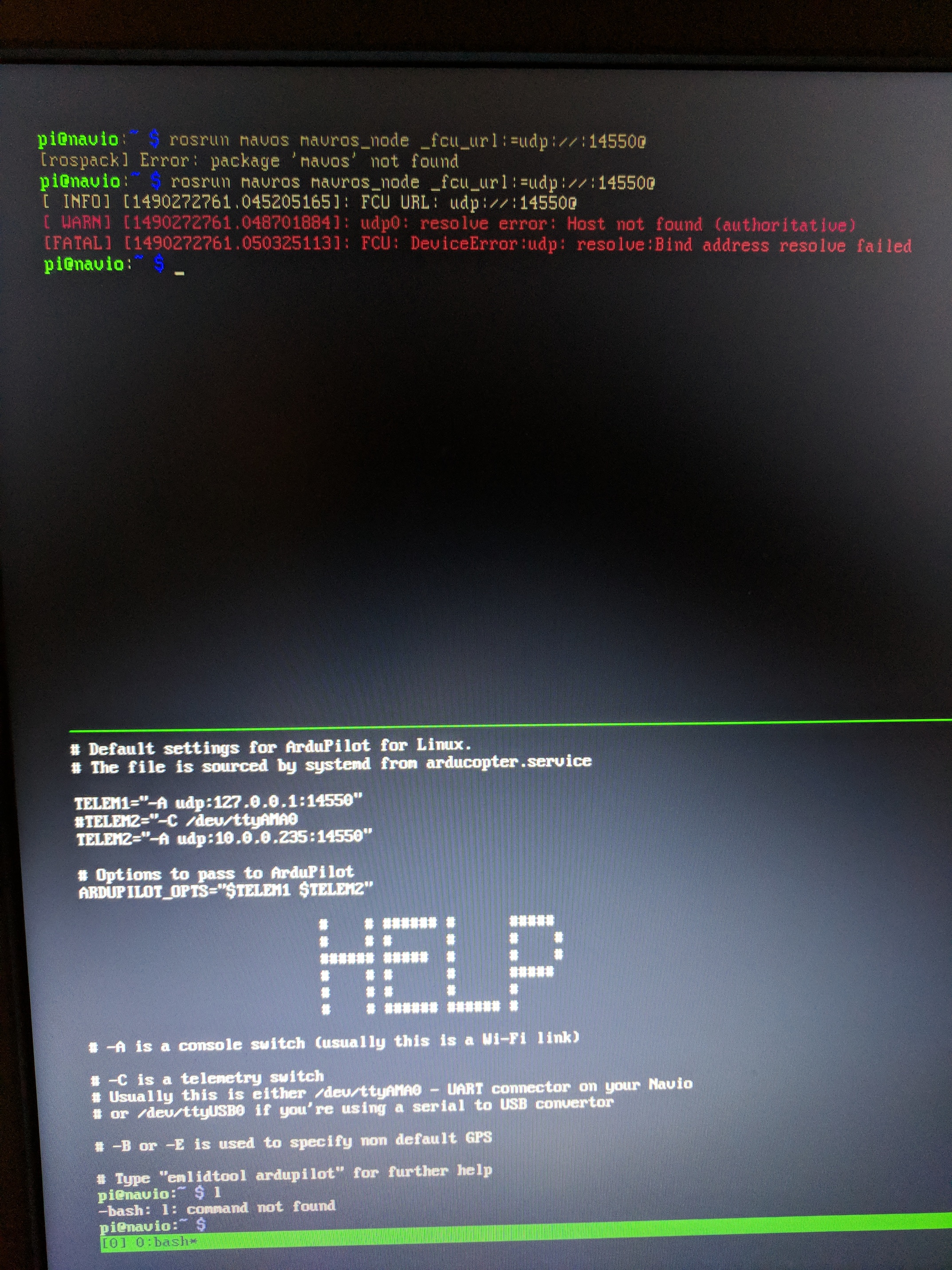
It’s still not working but at least I got a different error. Below I attached a picture of my error (top) and output from /etc/default/arducopter. (bottom)
I reset my SD card and just followed the instructions again except whenever the ROS instructions said “ardupilot” I pretended it said arducopter.
The IP port is the same in the rosrun command as it is in the arducopter file so I am at a loss.
I really appreciate the help, I feel like I’m close now. Hopefully you have seen this error before.
I just noticed I have been getting the same error ever since I tried using arducopter. Perhaps, MAVROS can only be activated with Ardupilot enabled? and not arducopter?
I will try using ardupilot instead of arducopter, as well as only one TELEM and let you know how it goes.