



Hello, I attempting to get accurate GPS coordinates of a given position using RTK. I haven’t purchased Reach yet, I first wanted to experiment on my own since I already had a couple of Lea 6T chips lying around (these: http://www.amazon.com/Hobbypower-LEA-6T-Compass-Controller-Multirotor/dp/B00N3I418S/ref=sr_1_1?[quote=“Ruprecht, post:1, topic:814, full:true”]
ie=UTF8&qid=1453751233&sr=8-1&keywords=lea+6t)
My setup:
A ublox 6t receiver connected to a Windows 7 machine.
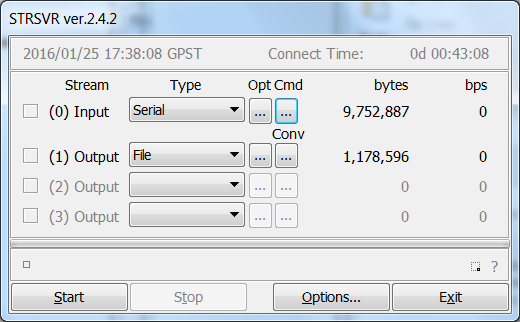
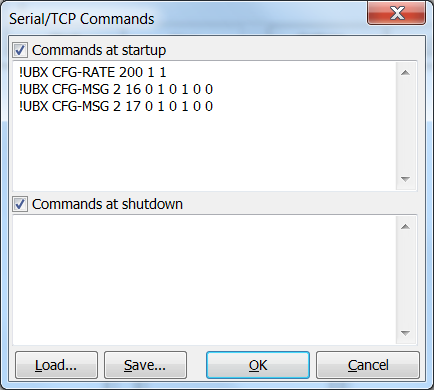
Step 1: I connect the 6t to the Windows 7 machine through a USB connection and store the incoming data according to the following parameters:
 <img src=“/uploads/default/original/2X/3/36761cea6d03cdd269fb646cdb68abfaec6878e8.png”
<img src=“/uploads/default/original/2X/3/36761cea6d03cdd269fb646cdb68abfaec6878e8.png”
I collect about 43 minutes of data.
Step 2:
I convert the RTCM data to Rinex using the conv utlity:
width=“487” height=“188”>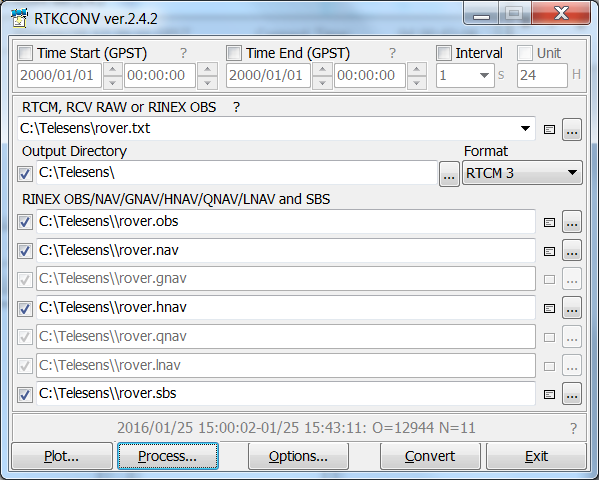
Various satellite visibility plots and SNR plots are shown below:
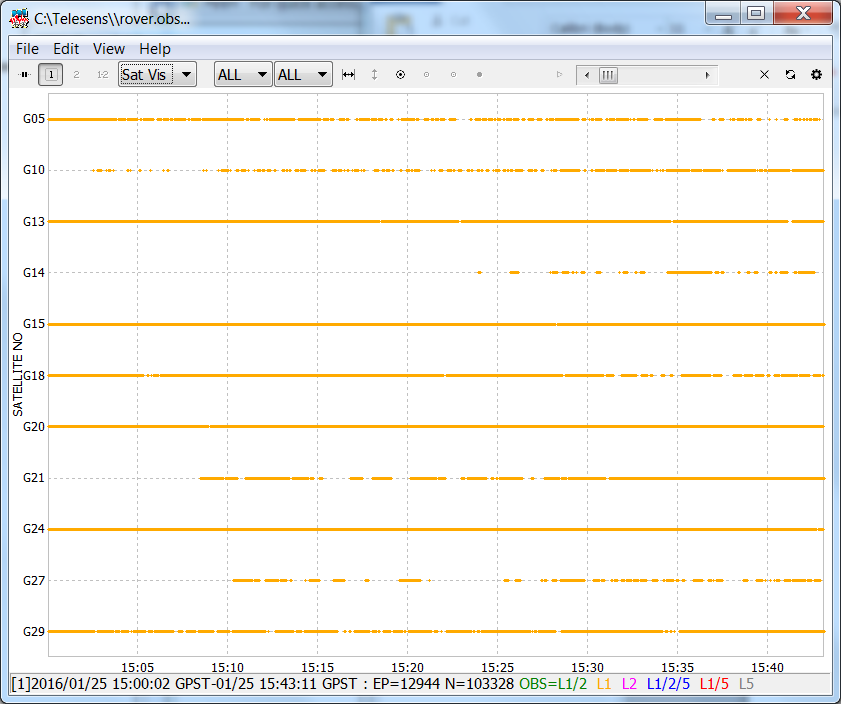
The 6t is not giving me L2 observations, are those necessary to obtain cm level accuracy?
Step 3:
I obtained the base station observation from the CORS data provided by NOAA from here:
http://www.ngs.noaa.gov/UFCORS/
I live in Arlington, VA, so I used the nearest base station located in Lorton (LOYB). I downloaded the GPS L1/L2 observations, the coordinate file and the IGS orbits. This data was supplied to rtkpost for post processing, as shown below:
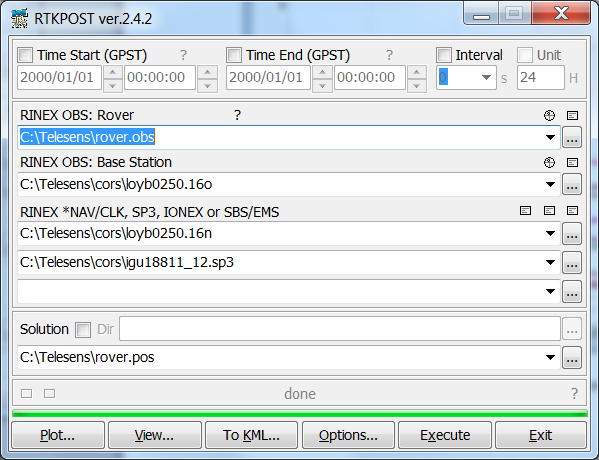
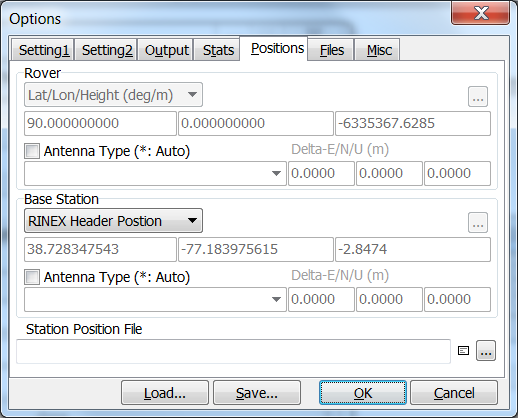
I asked rtkpost to obtain the base station position from the RINEX header. I also input the base station position manually, both methods gave me the same result:
Upon post processing, I get the following result:
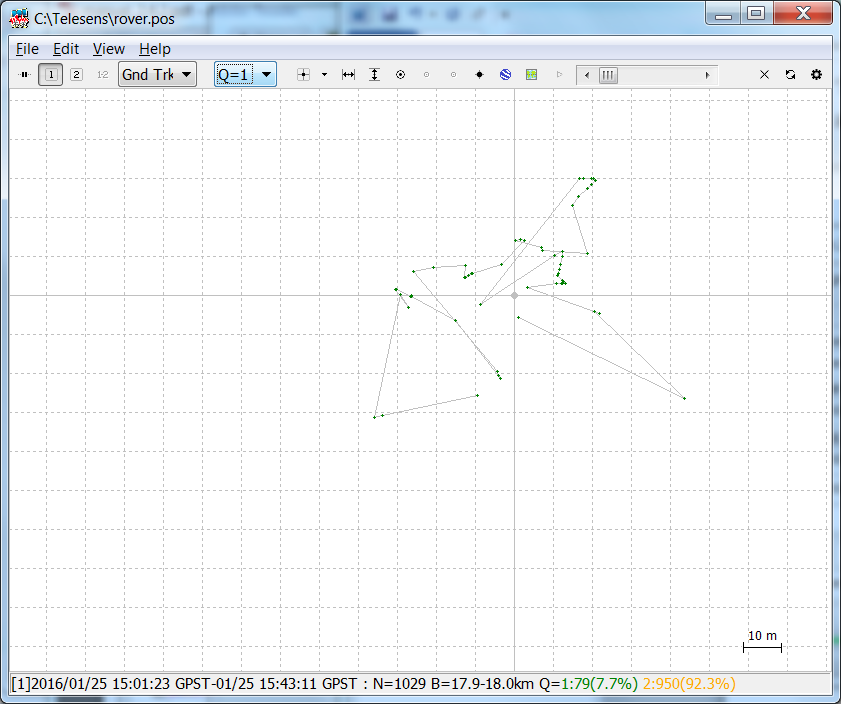
I got a fix for about 8% of my observations, but the position of the fix varies a lot. In my experiment, the rover was actually sitting in a fixed position, so I expected to get the fix positions tightly clustered around a single point.
Do I need to store more data?
Do I need a dual frequency receiver?
Any other thoughts/ideas?