



Free NTRIP services that are close enough are very Rare in general.
You can try this overview, some of these stations also provide NTRIP: http://www.onpoz.com/Support/BaseStations.aspx
Hi Christian Grüner
To consolidate what all we have tried using two reach units (rover + base ).
1)we have tried average single mode in base mode and accumulated the data for 15-30 mins and logged the data from the rover which is erroneous up to 5 meters .
2)We were not able to achieve Average fix and Average float modes in accumulating the data for base co-ordinates.
3)We cannot use NTRIP if we have to spend some money and do not have wifi access to connect to NTRIP as well.
4)we have tried PPK mode as described in the emlid reach docs even then we were not able to get the accurate position of the base which in turn we didn’t get the accuracy from rover data.
5)Finally could you please suggest what needs to be done in order to get centimeter accuracy in the rover data.
If you can’t even get a float solution, your Correction output on your base isn’t properly configured or the rover is not receiving the corrections.
Please follow this guide: Contents | Reach RS/RS+
Hi Sriharsha,
I’d also recommend checking this video:

Then I think this article will be very useful to read:
Hi,
I have watched this video in the beginning when we are configuring the base and rover for the first time we have followed each and every process ,but still we were not able to achieve the accuracy from the rover data. Please suggest a commonly used configuration through which we can attain centimeter level accuracy from the rover data.
The suggested setup is in the video. That will give centimeter accuracy if setup like Emlid says in the video.
Can you share a system report with us for both base and rover?
Hi Christian Grüner
Can you share a system report with us for both base and rover? : In which mode you want me to send the system report like what is suggested in the video you shared or any mode is fine.Even we have tried NTRIP mode even then the results are not proper we are plotting the latitude and longitude in google maps and verifying the output there is some 5-10 meters of offset.
Please post system report with the configurations you use. The process of getting system report is described here.
May I also ask you to share raw logs from both Reach units?
Hi
Please find the raw logs and system reports generated from base and rover.Basedata.zip (2.3 MB)
Roverdata.zip (2.2 MB)
How to get the base station coordinates from raw logs after post processing using ppp technique.
I’ve looked into your logs. The satellite visibility for both base and rover is poor. I’ve attached the screenshot for the rover unit:
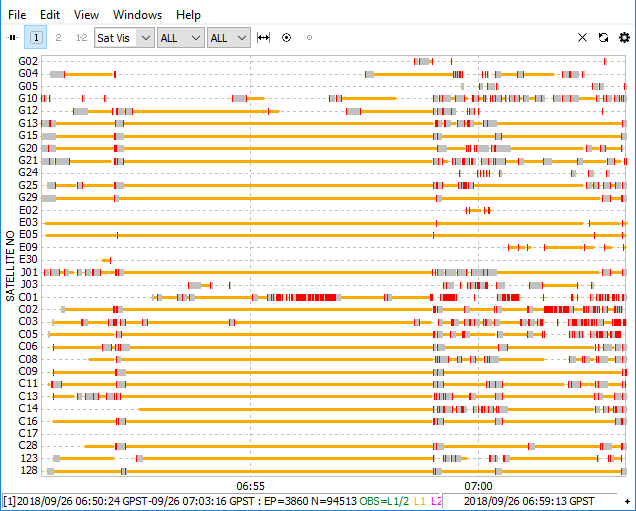
As you can see from the screenshot, there are a lot of red marks called cycle slips. That’s not good. What’s the environment condition where you surveyed? Could you also post photos of base and rover setup?
You can open .pos file in RTKPlot and hit “Show Map/Waypoint” button to see the base location.


Hi
Please find the setup of base station and for rover we are just placing it in hand and moving around and collecting the data.
What’s the rover pole height?
In such conditions, it might take a little more time to get a fix solution. May I ask you to use configurations from video guide @dmitriy.ershov shared above, raise the base higher and test another time? It also would be great if you’ll be able to record a log that will last longer.
You really need to get the base as high as you can that is feasible to work with. Generally starting at least 1 foot above your head for both base and rover. But personally when in urban areas like that, get a good sturdy tripod with an extension above that for the base. The higher the better but I am not saying go ridiculous high so it’s crazy to work with.
You need a rover pole also. Get a bipod also for the rover pole.
Also, place your base in the most open spot clear from adjacent obstructions as much as possible.
1 Like
Hi All,
I just want to make one point clear ,from the above explanation for the setup of base and rover it seems like the Reach units are good for surveying purpose in open fields, but we want to use it for the the sake of navigation purpose in autonomous cars where the rover will be mounted on top of the car and data will be processed .In that case will the rover gives expected results?
Hi
As of now we don’t have the survey pole for the rover we just handle it in the hand approximately chest height of a person.And about logging time how much time you are expecting to be recorded from the rover ?If you can tell us the how much long time we have to record we will do it and share you the logs.
A person holding a rover may partially block the sky view, what reduced your chances to get a fix. I recommend setting rover slightly higher than a person’s height. I suppose something in between 1.8-1.9 m would be perfect to provide a better view of the sky.
Please take into account this recommendation and record at least 20-minutes logs from both base and rover. In the environment like yours, it’s more likely you need to spend more than few minutes to obtain a fix.
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.