I have been faced with a problem to get fix soluiton in RTKLIB.
I have enough experience to operate Reach series (M+ and RS) and RTKLIB.
However, all recent surveys after start using new Reach RS2 and M2 failed probably because of noisy signals.
Yesterday, I did a comparative test using Reach devices I have (one RS2, one M2 and two M+). All devises are installed latest firmware and sampled GPS, Galileo and Beidou with 5 Hz.
The combination of two Reach M+ got a stable fixed solution. However, calculations using RS2 and/or M2 showed abnoramal results.
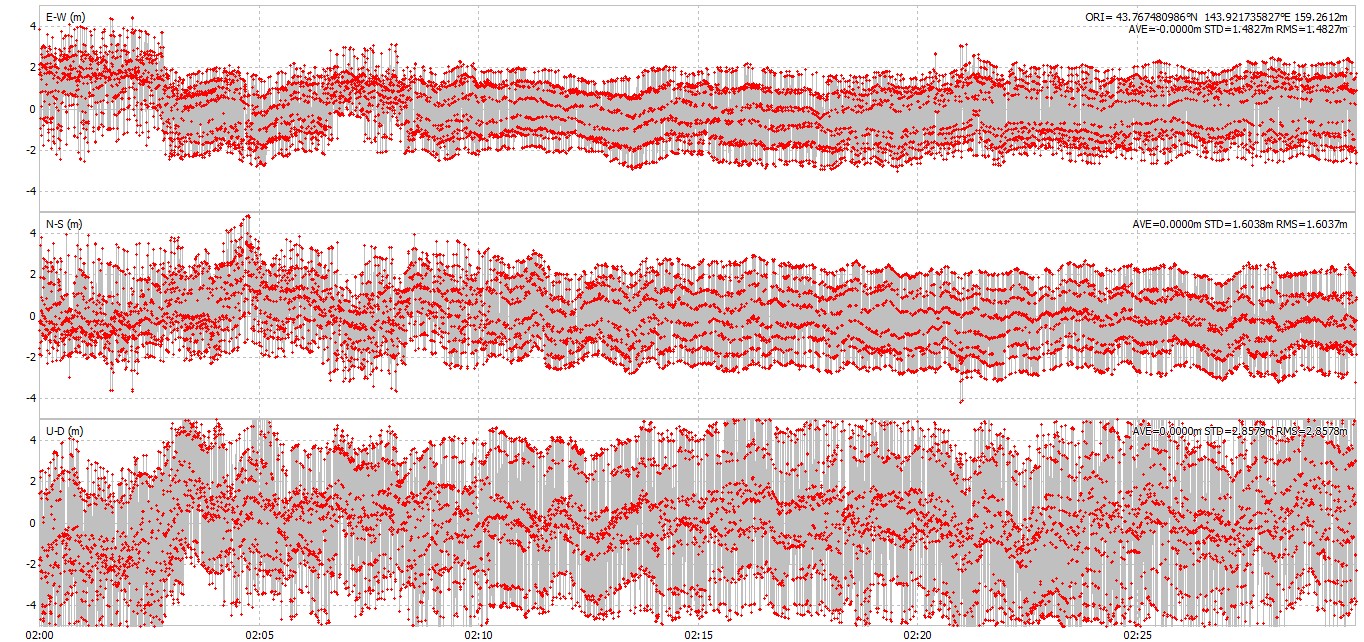
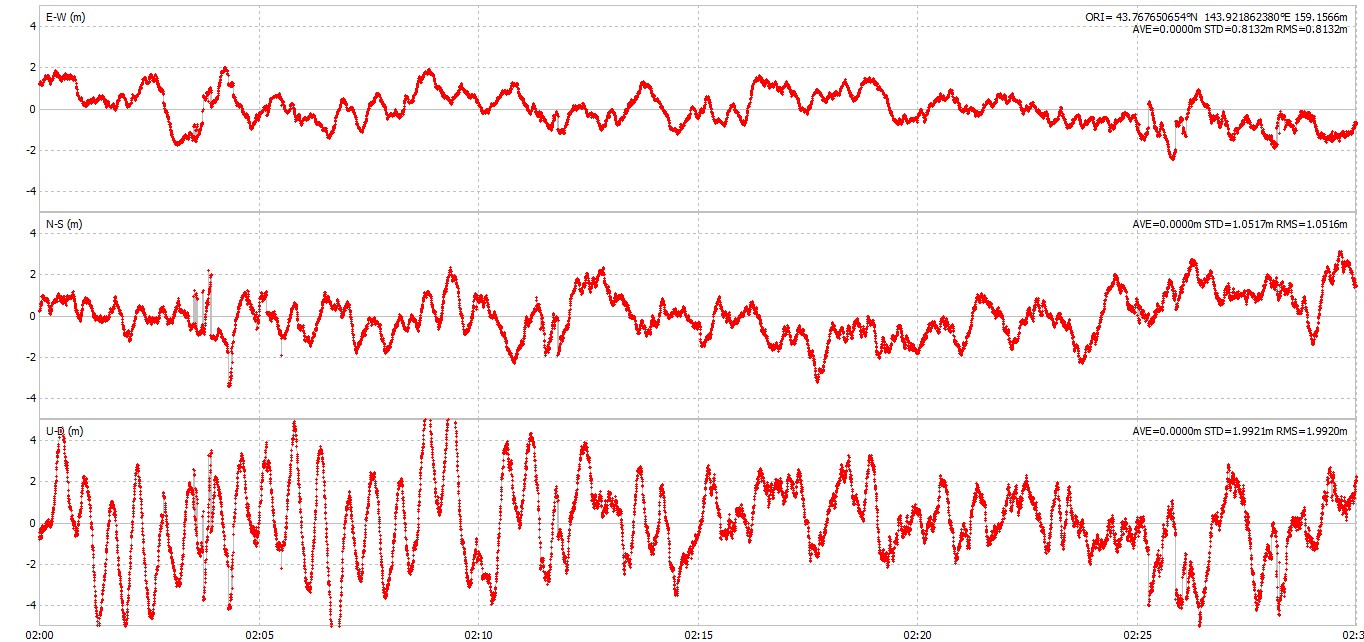
I realized that RS2 and M2 contains noisy signals in comparizon with M+.
These two images show the results of RTKLIB calculation in single positioning.
The upper image is RS2 and lower is M+.