1) Image and ArduPilot version.
APM:Copter V3.4.6 (e707341b) 2) Detailed problem description. How does observed behavior differ from the expected one?
I don’t get any telemetry data when making a UDP or serial connection in APM Planner 2.0. I do get telemetry data when making a TCP connection from APM Planner to the RPi/Navio2. Details below. 3) Your step by step actions.
The following setup works:
Starting ardupilot using systemctl with -A tcp:0.0.0.0:5678:wait
I can make a TCP connection from APM Planner 2.0 to using the IP of my Raspberry Pi and port 5678.
I get telemetry data and I can arm the copter using AMP Planner and fly using RC_OVERRIDE and a joystick.
The following setup does not work:
Starting ardupilot using systemctl with -A udp:127.0.0.1:14650 -C /dev/ttyAMA0
In APM Planner I can successfully make a UDP connection to 14550 but I get no telemetry data.
In APM Planner I can successfully make a serial connection to my 3DR radio tty.SLAB_USBtoUART but I get no telemetry data.
Try as I might I cannot make a connection and get telemetry data using UDP or Serial connections. Am I missing a step somewhere? I initially spent a lot of time investigation my 3DR radio setup but the fact that I also cannot make a UDP connection leads me to believe I have a more general setup problem.
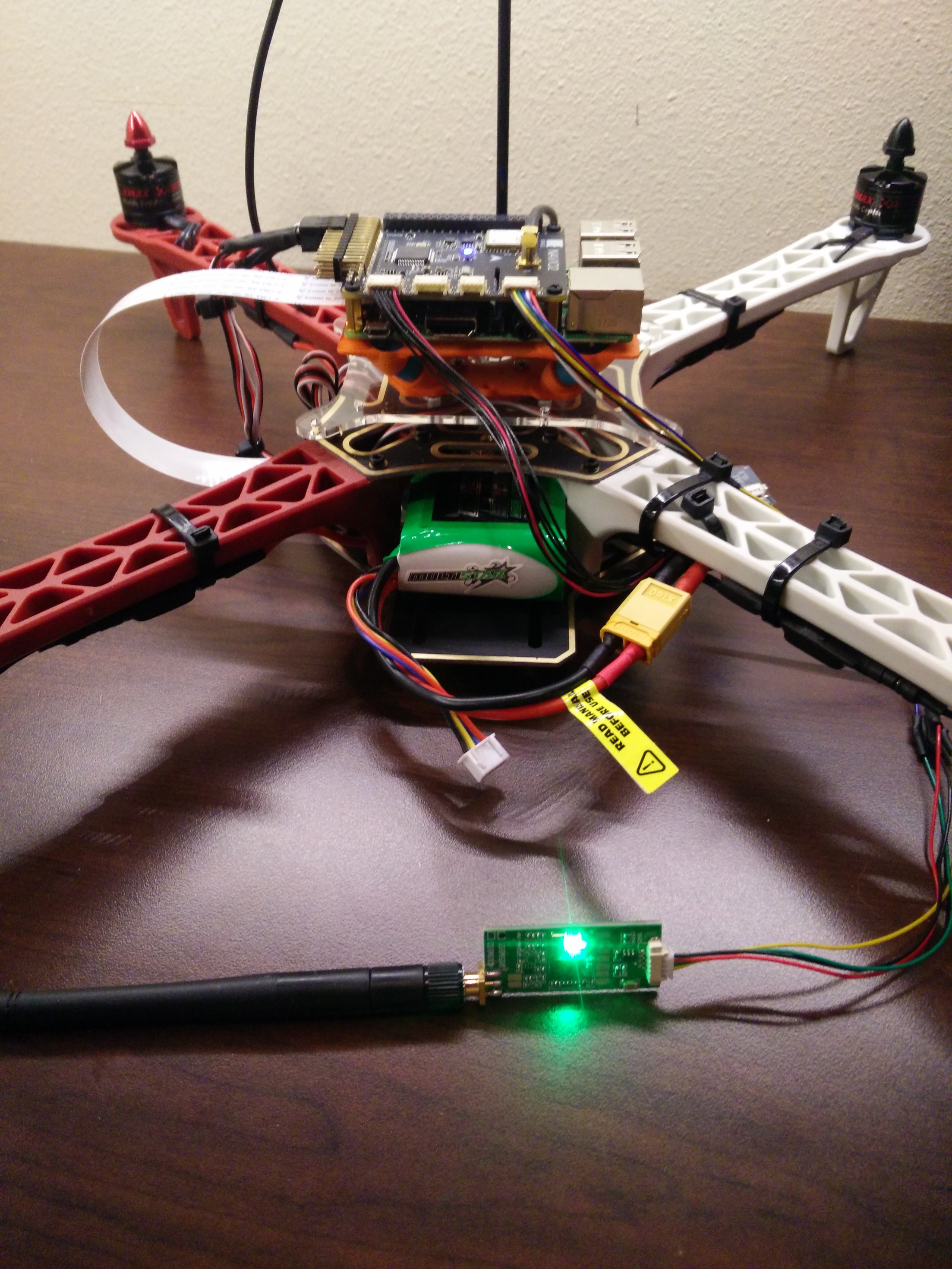
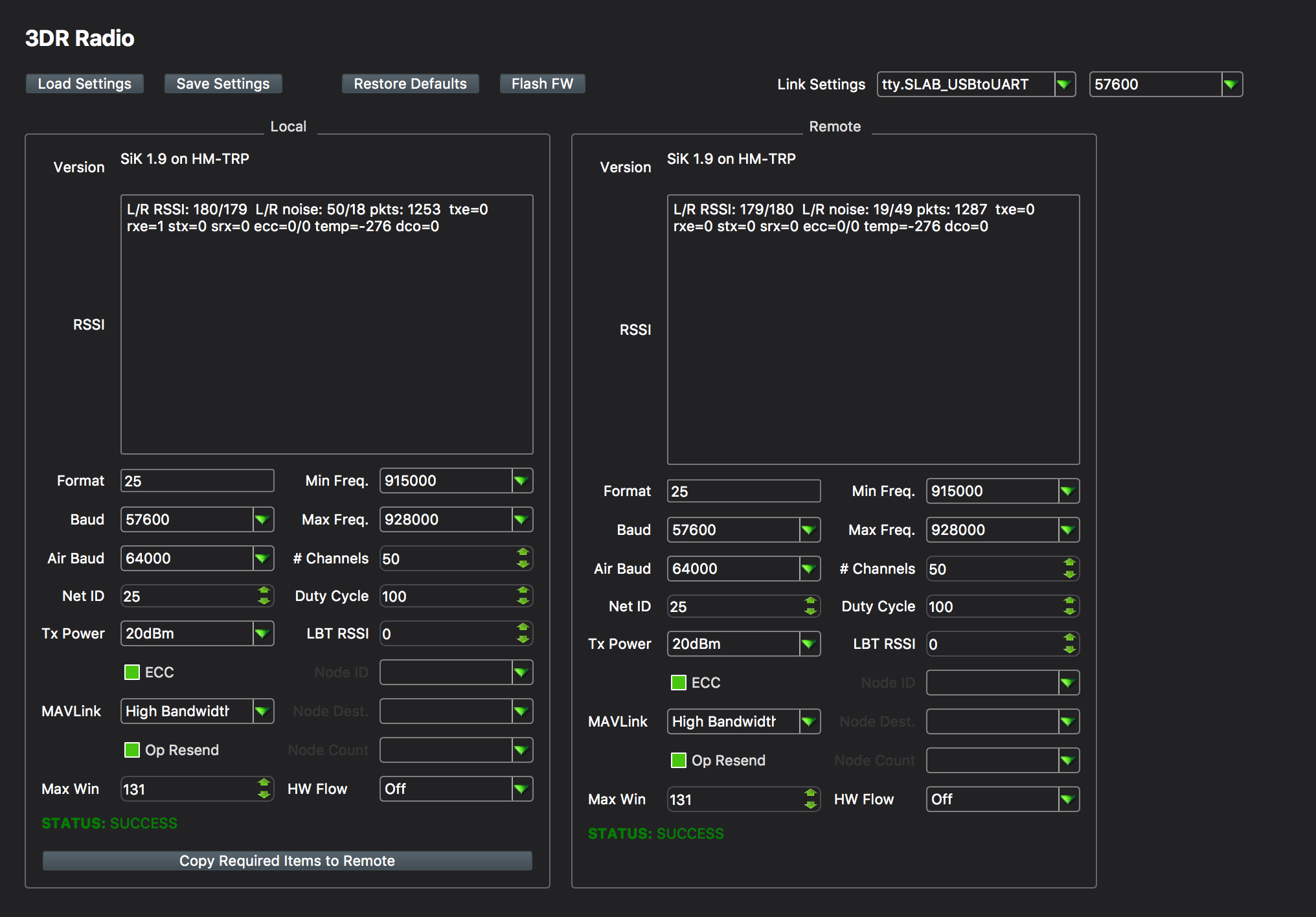
I should also say that my laptop sees the telemetry radios and in APM Planner’s 3DR setup menu I can load settings and save settings to both radios using the tty.SLAB_USBtoUART serial option. The radio indicator lights are solid green.
Yes and no I guess. When I try to connect over UDP using mavros I set the value to #TELEM1="-A udp:127.0.0.1:14650" and then start mavros using rosrun mavros mavros_node \ _fcu_url:=udp://:14650@ \ _gcs_url:=udp://:14551@192.168.0.25:14550
When I try to connect directly I set the value to TELEM1="-A udp:192.168.0.25:14550"
In both cases APM planner shows that the connection is made but no telemetry data is shown.
Oops, that was a typo when I copy and pasted. I’ve been commenting and uncommenting input values while trying different configurations. To confirm: it was uncommented when I tested it.
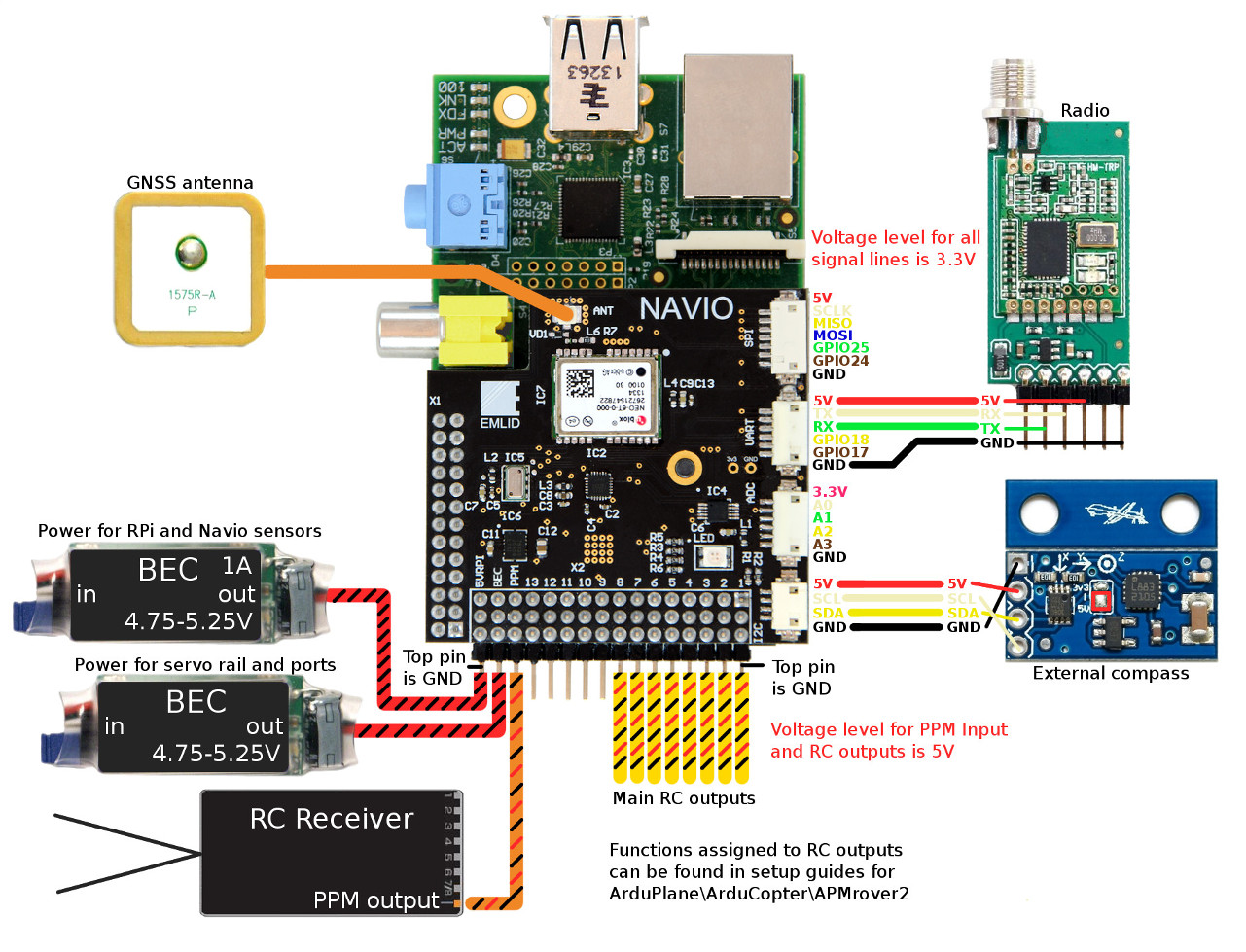
I think so. Below is the wiring diagram I followed (I know it’s a NAVIO board but the NAVIO2 UART pins are the same–as best I can tell). I stopped short of swapping them because I’m not able to get telemetry with a UDP connection (it feels like I have a larger issue). I’ll try swapping them tonight and report back.
I confirmed that I am seeing the same behavior (connection with no telemetry data) with both combinations of tx and rx wires between the navio2 and radio.
I get the same behavior with UDP connections in Qgroundcontrol: the link status shows as “Connected” but I don’t get an actual connection to the vehicle. Status at the top of Qground control says, “Waiting for Vehicle Connection”.
LED is blinking green which I believe means “Disarmed (ready to arm), GPS lock acquired.”
Is there anything I can do on the RPi to confirm the telemetry data is being sent?
Qgroundcontrol has better logs than APM planner. Looks like I’m getting a permission error on the UART serial link/port when I’m trying to connect using the 3DR radios. Posting here in case anyone has seen something similar. Will keep debugging.
[D] at /Users/travis/build/mavlink/qgroundcontrol/src/QGCMessageBox.h:97 - "QGCMessageBox (unit testing) "Link Error" "Error on link /dev/cu.SLAB_USBtoUART. Error connecting: Could not create port. Permission error while locking the device""
[D] at /Users/travis/build/mavlink/qgroundcontrol/src/comm/SerialLink.cc:234 - "open failed "Resource busy" QSerialPort::SerialPortError(PermissionError) "/dev/tty.SLAB_USBtoUART" true"
But I’m still not getting telemetry data in Qgroundcontrol. The green leds on the radios are solid green and I’m getting occasional blinks from the red Tx leds. What am I missing?
I would start with the hardware. Use a multimeter to verify connection from the uart to uart modul.Measure on the solderpoints on the board it self and both navio and radio with the wire connected but with power off.
Second. Try with a different computer if you dont want to troubleshoot you own software on you computer.
Are you able to change any of the radio settings and save it? Like changing th tx power on the rx unit.