Hi guys. I dont know, what i`m doing wrong. I have baseline about 1,5 meters, absolutely clear sky, big parking, base and rover at the cars roof, WiFi Access point, notebook and pixhawk all in one WiFi network. No Fix all time. And after 18:33 too.
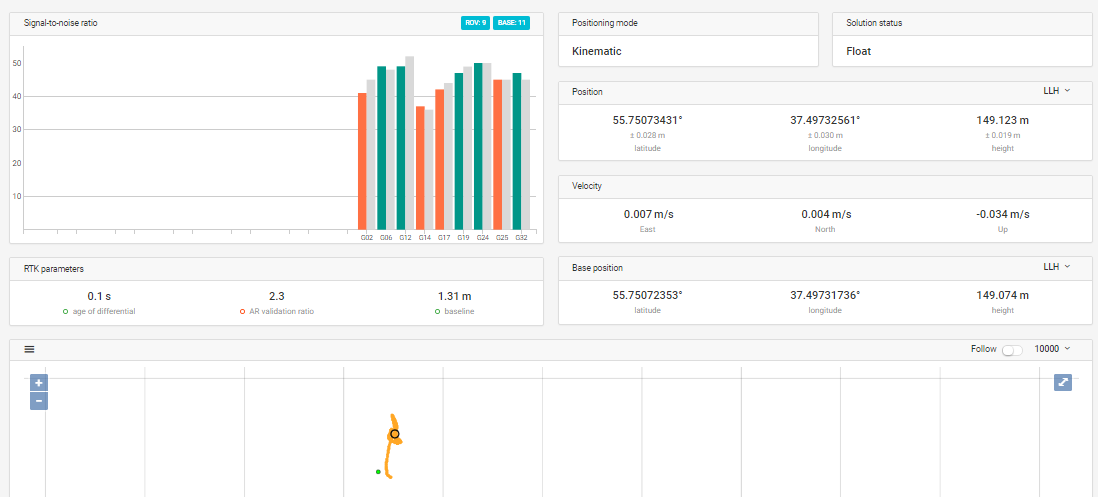
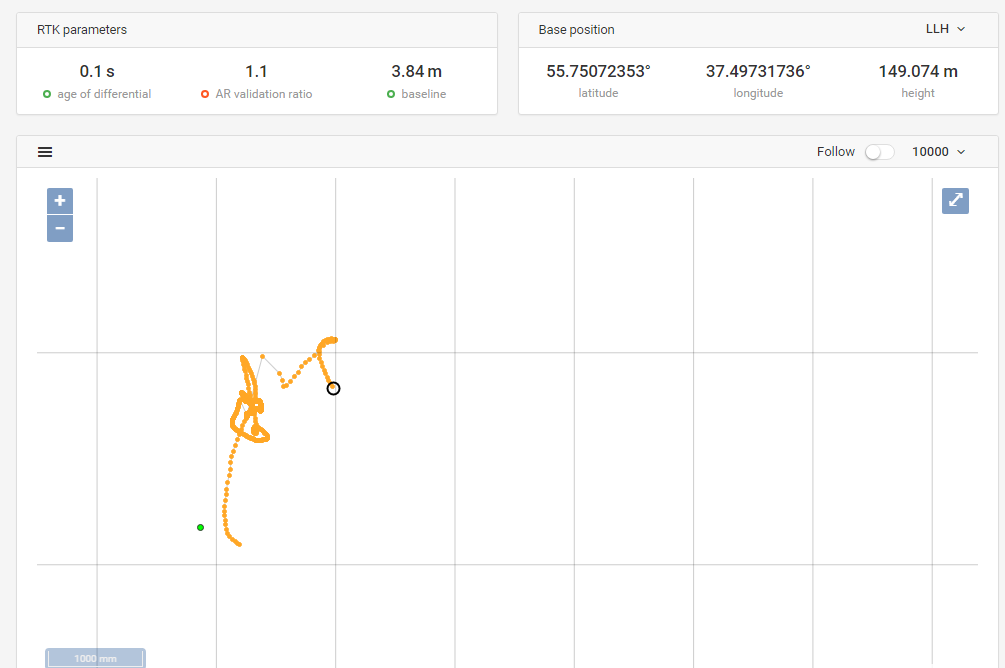
What is 0.1s age of differential? Is it = (time now) - (time of recive last correction packet) or
=(time now) - (timestamp of last recived correction packet) ?
Were I can read about AR? I could find anything about this.
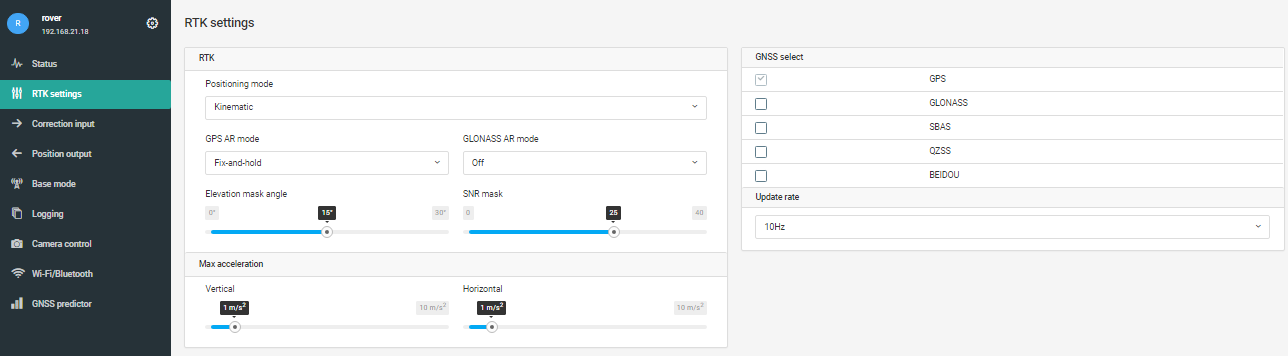
All fix points are after 18:33 - at this time I have started some experiments with RTK-settings tab: I have changed Fix-and-hold, elevation mask, SNR mask many times. Does it have effect on raw log files? How? It must have effect only on real time computing. Am I wrong?
I think, at Signal-to-noise ratio graph would be nice to have some marks on satelites, that are out of elevation mask and SNR mask. So we could see how much good stelites at real time.
And what I can do to have a realtime fix solution?
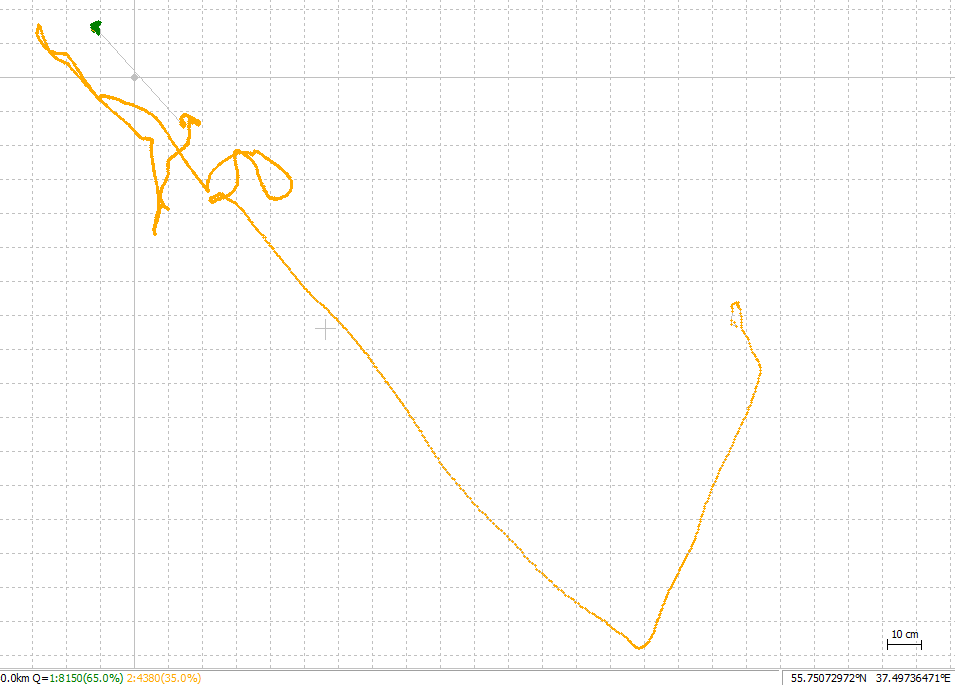
When you are changing the settings you are reinitializing the RTK solution, while in post-processing you have a single uninterrupted file to work with. This is why you get different results.
I use only GPS. Other systems are adding only noize and wrong corrections for me. Everywhere I set 10 Hz because it would be a rover, so i need fast update.
Ok. But its strange, that all fix points are only during my experiments…
What is 0.1s age of differential? Is it = (time now) - (time of recive last correction packet) or
=(time now) - (timestamp of last recived correction packet) ?
and how can I become fix real time solution? Im trying for 4 weeks, and I have fix only for 1 minute and I dont undestand how it comes and how it lost.