I am logging data from an RS2 and M2 to conduct ppk ground control points for a phantom 4 pro v 2 and when I post process the data in RTKLIB I get empty position files and errors such as “no solution” in the RTKplot software after I have put the base OBS, rover OBS and rover NAV in RTKpost.
Does any one have any suggestions as to why this keeps happening? Why can’t I get events to trigger and use the base station to correct the rover data?
Note: I have no known base point so I want to use the average base point from the RS2 to correct for the rover on the ground control points.
Thanks in advance! I can provide the raw files if that helps!
Usually, this might happen when the base’s and the rover’s logs were recorded at different times. Can you please specify if you recorded both logs simultaneously? You can share them with us if you’d like.
yes! they are recorded at the same time. I leave the base station out for 1+ hours and during that time I am trying to do ground control points and a drone flyover with a ppk rover.
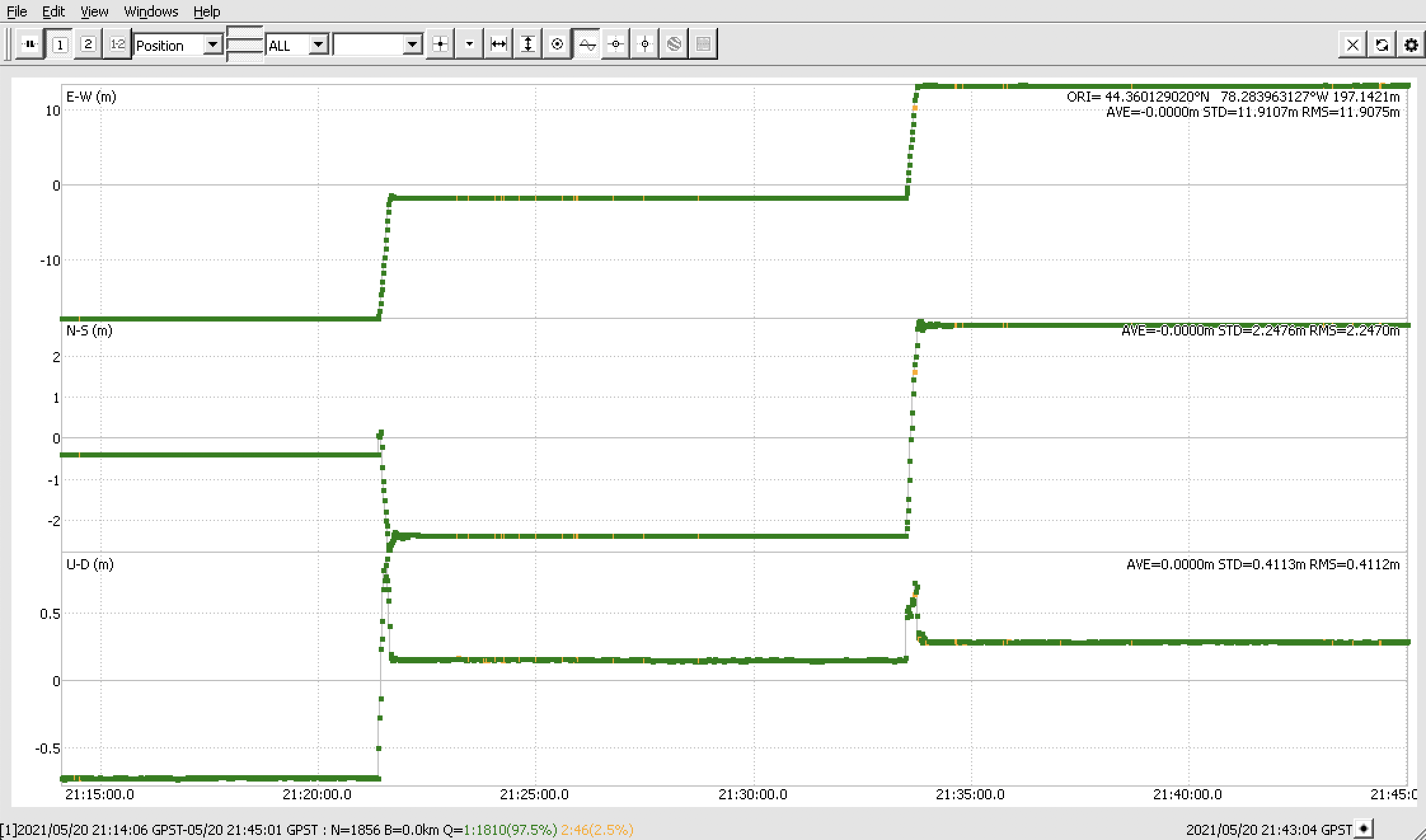
I’ve processed the logs in our version of RTKLib and got 97% in Fix for the GCPs rover in the .pos file. I used the standard settings from our GPS post-processing guide and the Combined filter type.
The .events_pos file is empty since the raw data log from the rover doesn’t contain time marks. The time marks are used only to record moments when the camera connected to Reach M2 takes photos. For GCPs calculation in PPK, you will need to manually record the Time Start and Time End for each point and enter these values in RTKPost. It may take time, that’s why we usually recommend the more straightforward RTK GCPs collection workflow.
I have no known base point so I want to use the average base point from the RS2 to correct for the rover on the ground control points
Please note that if the Reach RS2 position is averaged in Single, you will get relative accuracy only. It’s appropriate for some applications, such as volumetric measurements. To get absolute accuracy, you may average the base position in Fix or use the PPP technique to find the coordinates.