Yes, when I write wi-fi disable option - I mean “Turn Wi-Fi off to save the battery power functionality” As I write wi-fi starts normally as wanted on every boot.
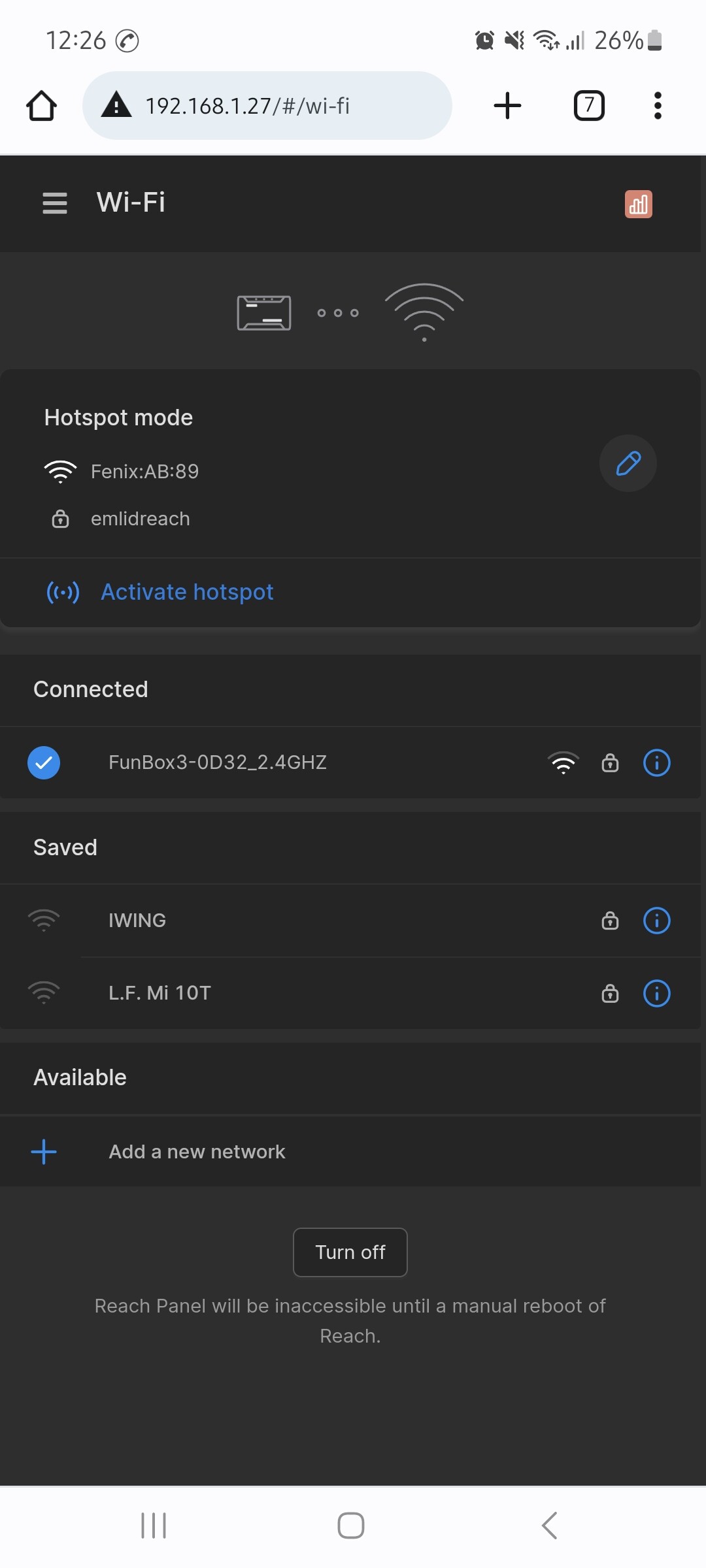
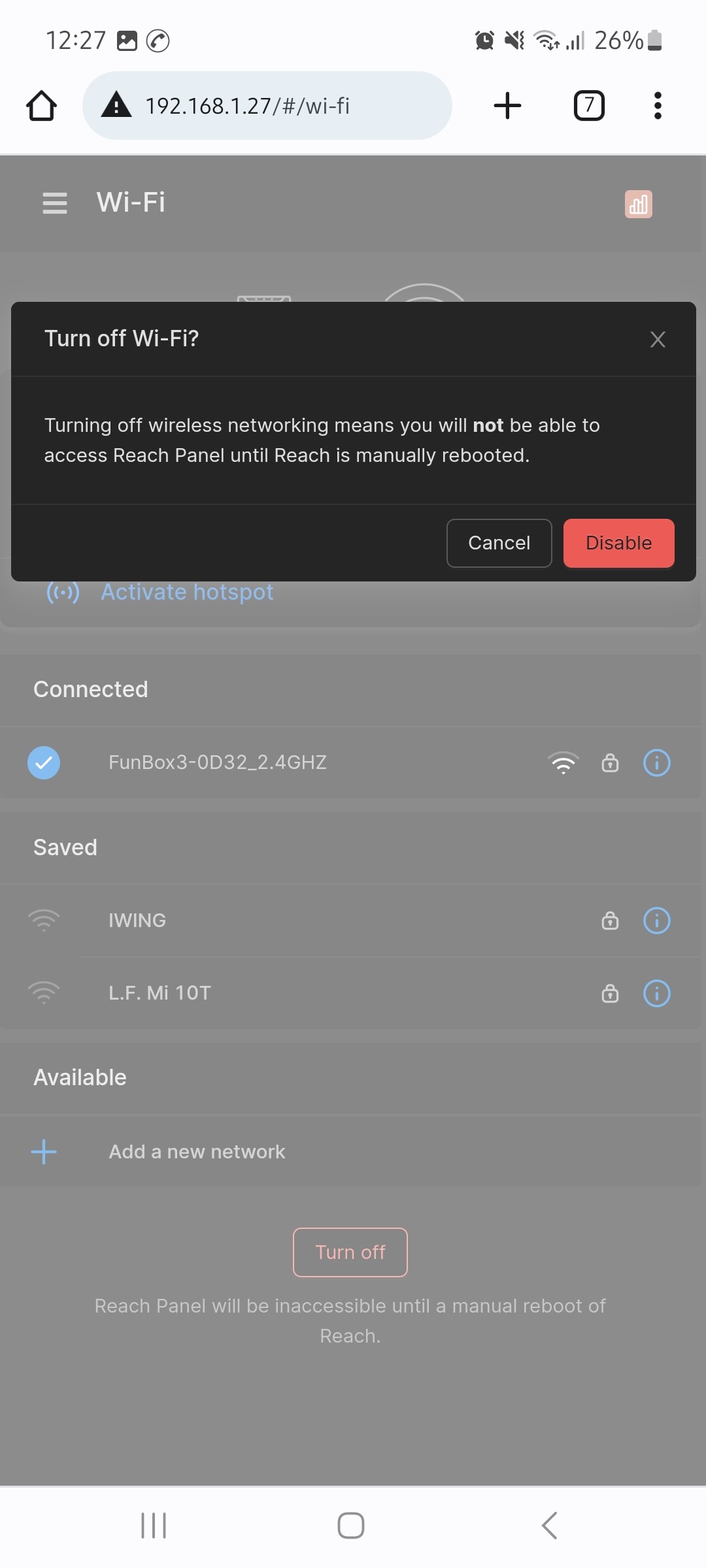
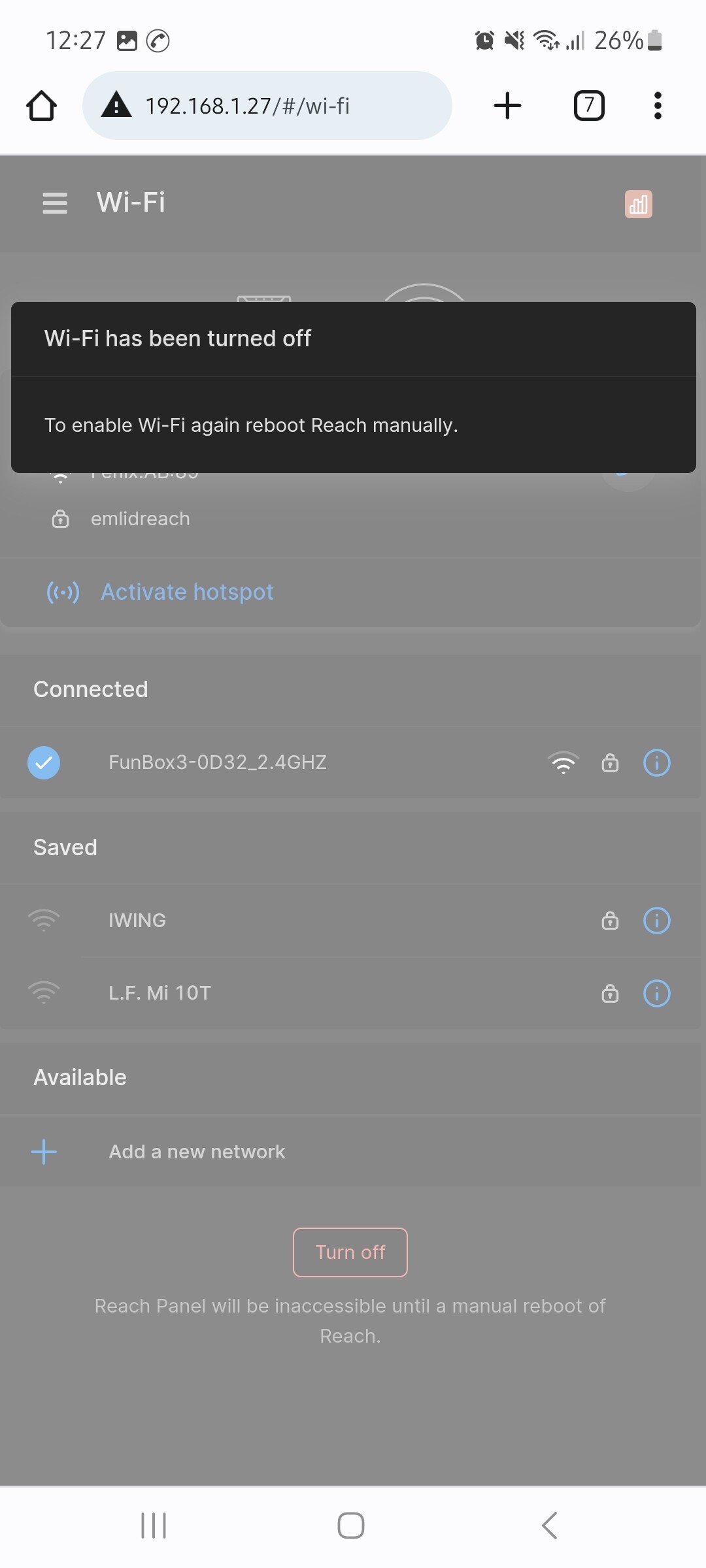
But there is problem with missing switch/options to disable wi-fi and etc. For clarification: there is situation when after reboot reach wi-fi is working as hot-spot but there is only enable wifi switch/option at www (and that switch doesn’t do anything). So I’m unable to switch off reach hotspot, or connect to another external wi-fi. That’s old bug, that been previosly cleared but now reappears.
edit: I checked on 30.1 fw and same that on 30.0
Also if reach is connected to external wi-fi and I use disable wi-fi option, after first reach power restart and wi-fi auto reconnect there is same bug and only visible option at 192.168.xxx.xxx/#/wi-fi is enable wi-fi.
Could you probably elaborate on it a bit further by providing some screenshots or a screencast for illustration? You may share it with me by sending it to support@emlid.com. I’ll take your email and we’ll check with the devs on what’s not working fine.
We are having an issue with our RS2’s (6 total) not showing any connection or data in the Status overview window and also the Corrections portion. The RS2 still beeps like it is fixed or lost fixed. But there is no data stream for satellites or NTRIP. There was no issue last week when using the RS2’s, but today this has came up.
Ok so after a few hours of panic and headache, I have figured out that it is only the Bluetooth that is affected for us. If I switch to WiFi I can get corrections and satellite data.
Added info:
I have now flashed one of my units with 30.1 and it seems to function fine. It is odd to me that 4 out of or 6 units I could test had the same issue, all Bluetooth. Also did this update change the need to connect via setting in an iPhone? the units do not show up in my setting WiFi or Bluetooth, but show up in the Emlid Flow app.
There is some screenshot’s. I also send e-mail with video record
Apparently on fourth screenshot there is unproper Enable Wi-fi option, that also does nothing.
Instead like in screenshot fourth available options should be like in first screenshot after every reboot.
Thank you! I also received the videos, which were very helpful! I was able to reproduce the same behavior. I’ll look into it with the developers and get back to you with updates.
Did we loose the ability to check the rover/base location on the OSM map through the browser interface at 192.168.2.15 for example?
It was quite convenient to do a quick check on rovers connected to machines remotely.
We don’t have this map anymore in the new Reach Panel, indeed. Can you please elaborate more on what you mean by quick checks? Maybe, there’s a workaround to this workflow.
Through the browser interface, I was able to check if the gps-position on the map was stable.
I used to be able to drive the rover around and visually check the trajectory taken by the robot on the map.
It was quite convenient for me, and especially helpful to check the real-time stability (oscillations/jumps) in spaces where the rover did not have full fix and adjust parameters if needed.
Do u think, there is a way to do the same, using Emlid Flow web-interface ?
I see, thanks for clarifying this! Currently, the other way is only to check the rover solution separately in Emlid Flow or Reach Panel. And based on the rover status make the adjustments.
We’re thinking about adding a feature to auto-collect points at regular distances or time intervals in Emlid Flow. I believe it can come in handy for your workflow.
The recent update improves the compatibility of RINEX files for post-processing in third-party software. You can now use Reach logs for PPK in your preferable software with no trouble.
What is the technical scope of this improvement, how does it translate into something different in raw adata storage?