



Hello everyone, is it necessary to post process GCP after collecting them with a base and rover RS+? Does RTKLib offer the same results as EZsurv? Since this last one is paid
If you have a strong and confident RTK fix there is no reason to post-process besides verifying the data. RTKLIB does actual post-processing as well as if not better than EZSurv. EZSurv has other functionality and automation that RTKLIB does not have. RTKLIB will give you the opportunity to fix bad situations better than EZSurv, but that shouldn’t be a frequent occurrence or you would be doing something wrong. If you are a company wanting a solution for several people to use then go with EZSurv. If you are one or two people that don’t mind a little more manual process then stay free.
Thank you Michael. Can you tell me if this is the correct procedure to post process GCPs: Tuffwing: Simple Reach PPK Tutorial
Yes, for the mostpart. A few clarifications. Also, this is for use on a drone not ground surveying GCP’s so keep that in mind.
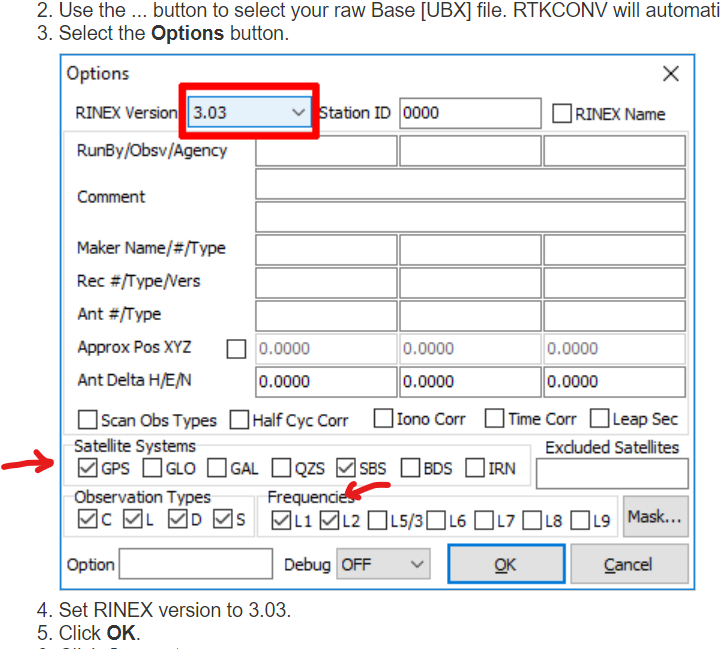
Convert Step 3, you’ll want to make sure to correctly select what constellations you are using and what frequencies. In your case L1 only.
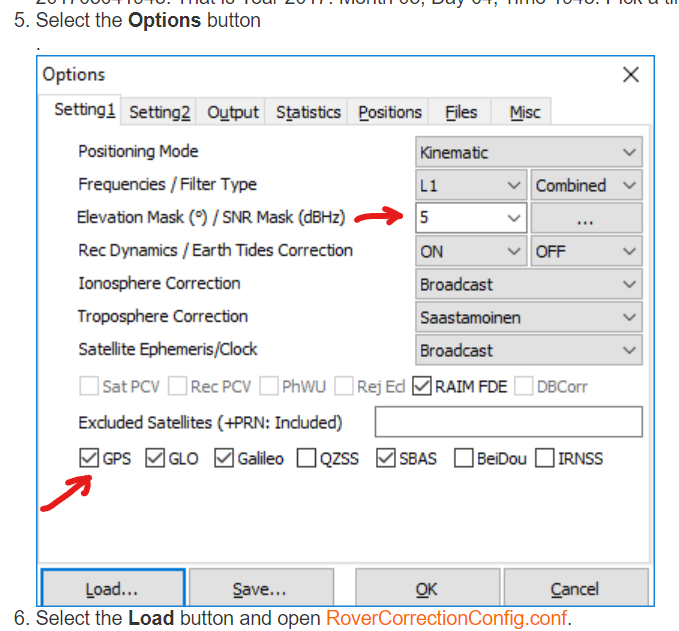
Correct Step 5-6, forget step 6. Use the visual configuration, but start with a 15 degree elevation mask and configure you satellite constellations to what you used.
Lastly they didn’t include one of the most important parts. Actually it is important on the drone as well. You will want to configure your rover and base antenna heights (pole offsets). Also, if you are on a known point you will need to put in your base coordinates and elevation. My rover height is setup for my drone so yours will obviously be higher.
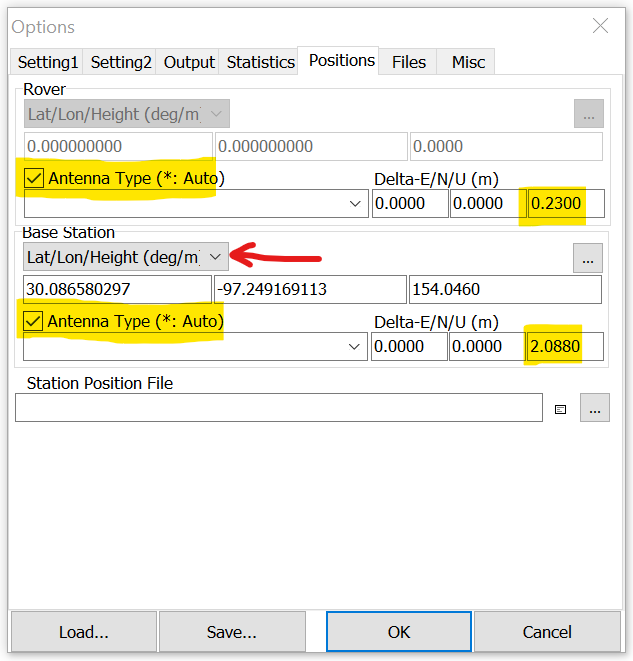
You only have to set most of these once if you are using the same setup each time as the settings are persistent, but remember to change your base position coordinates if you enter them instead of using the default Rinex Header values.
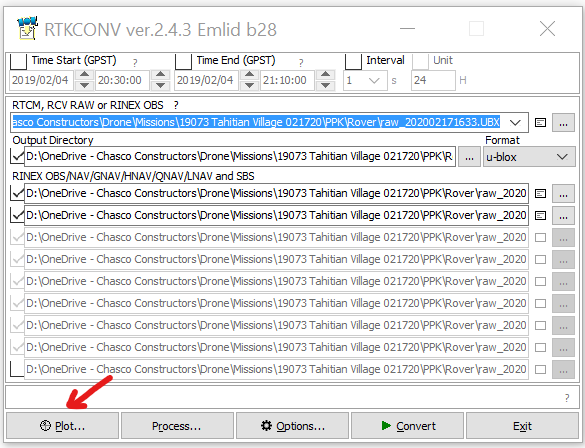
I will add that if your are pretty comfortable with the RTK status of your survey then all you have to do is the RTKCONV part and choose Plot to look at the satellite streams to look for any really bad signals. If it looks bad then go ahead and process, but honestly the whole thing doesn’t take very long and then you have backup documentation.
1 Like
Great explanation. Thank you very much…
Just to add:
- If I select Rinex header position it will automatically take the data from the position the base had? or how does that work
- The Rover_###.pos file, generated with RTKPOST, is the one that contains the corrected info I will enter to Excel right?
1 Like
- That is correct, but make sure to review the report to make sure they are correct. If you use the header you have no leverage on the vertical.
- Depending on the naming convention, but it fills it in for you in the solution line item at the bottom of the RTKPOST entry window.
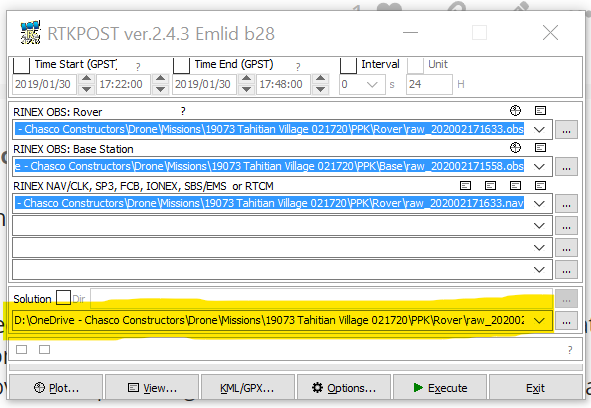
I build my directory like this. You have to pay a little more attention to the directory paths you enter in the windows, but it keeps the data much better organized and is easy after a couple of times.
- Mission Data Folder
- PPK
- Base (raw files and RTKCONV output)
- Rover (raw files and RTKCONV output)
- Output (RTKPOST output, POS and GPX/KML files)
- PPK
1 Like
Hi Nelson,
We also have a couple of guides about PPK in our docs:
Hope they will be helpful too.
2 Likes
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.