So I got some strange problem with my X-Rock telemetry. When I tried to connect to Navio2 from mission planner with UDP everything went fine, no problems at all. But when I am trying to connect with telemetry on MP with 57600 nothing happens, just a timeout and no heartbeat. I tried many thing, changing port in /etc/default/arducopter, with serial and other thing, tried changing baudrate, in Navio2 or in MP and even on telemetry, but still no heartbeat.
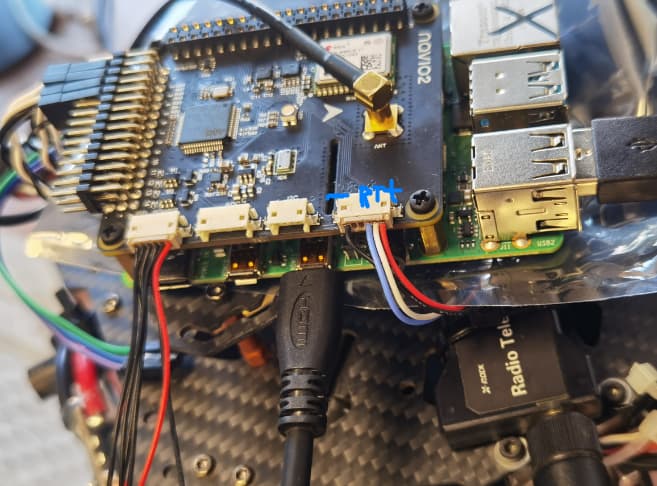
I have my telemetry connected to UART port on Navio2 (my wiring has only 4 pins, 5v, gnd, and TX and RX so no other 2 pins used). I am little lost here, may it be a problem with a telemetry? Or is it something to do with Navio2?
Telemetry is a this one:
Can you please show a picture of how your telemetry is connected to Navio2? Is this radio recognized by your computer? If you work with a Windows-based computer, it should appear in the list of Device Manager.
Can you please double-check that the TX wire from Navio2 goes to the RX wire on the telemetry and vice-versa?
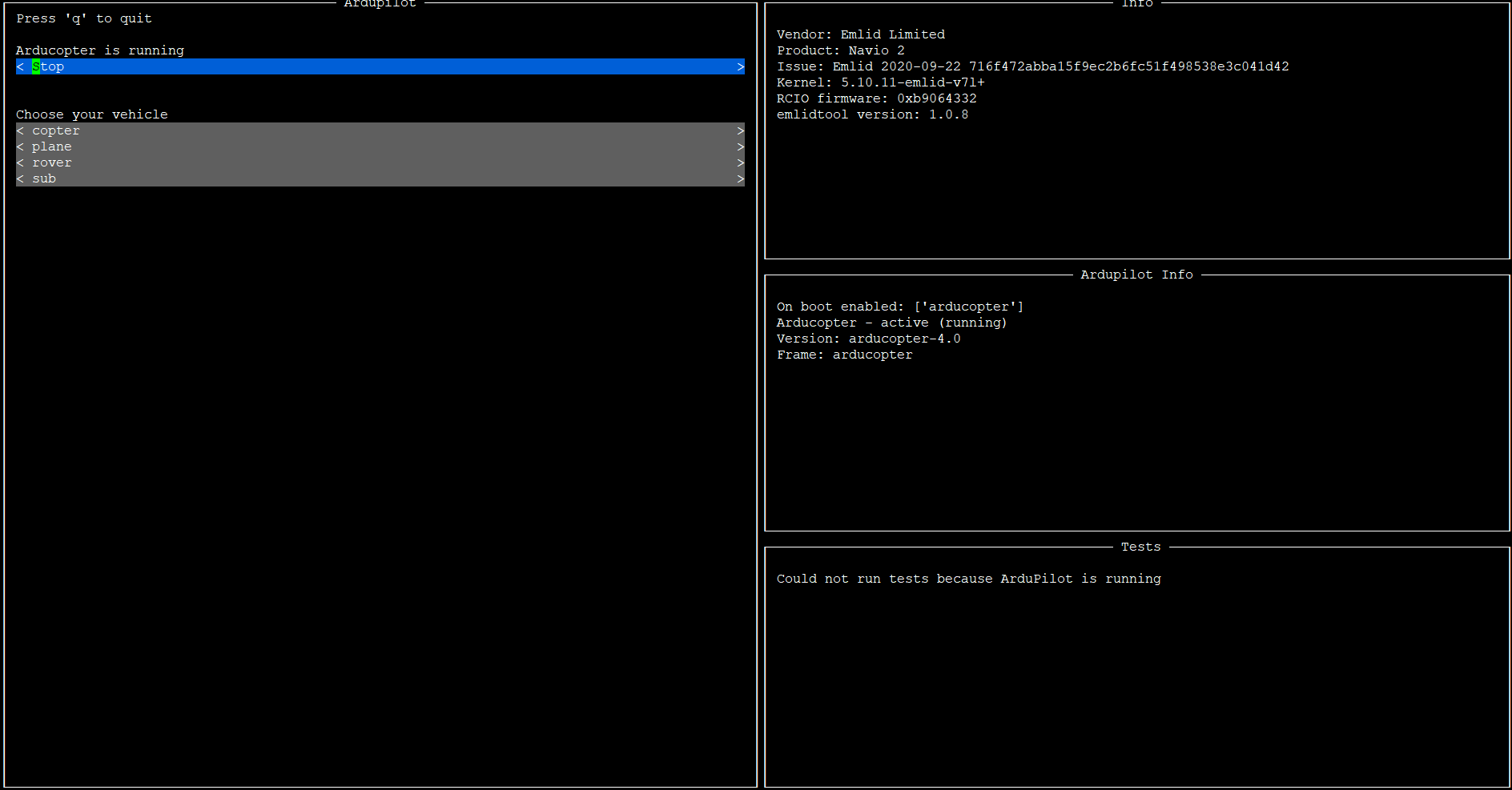
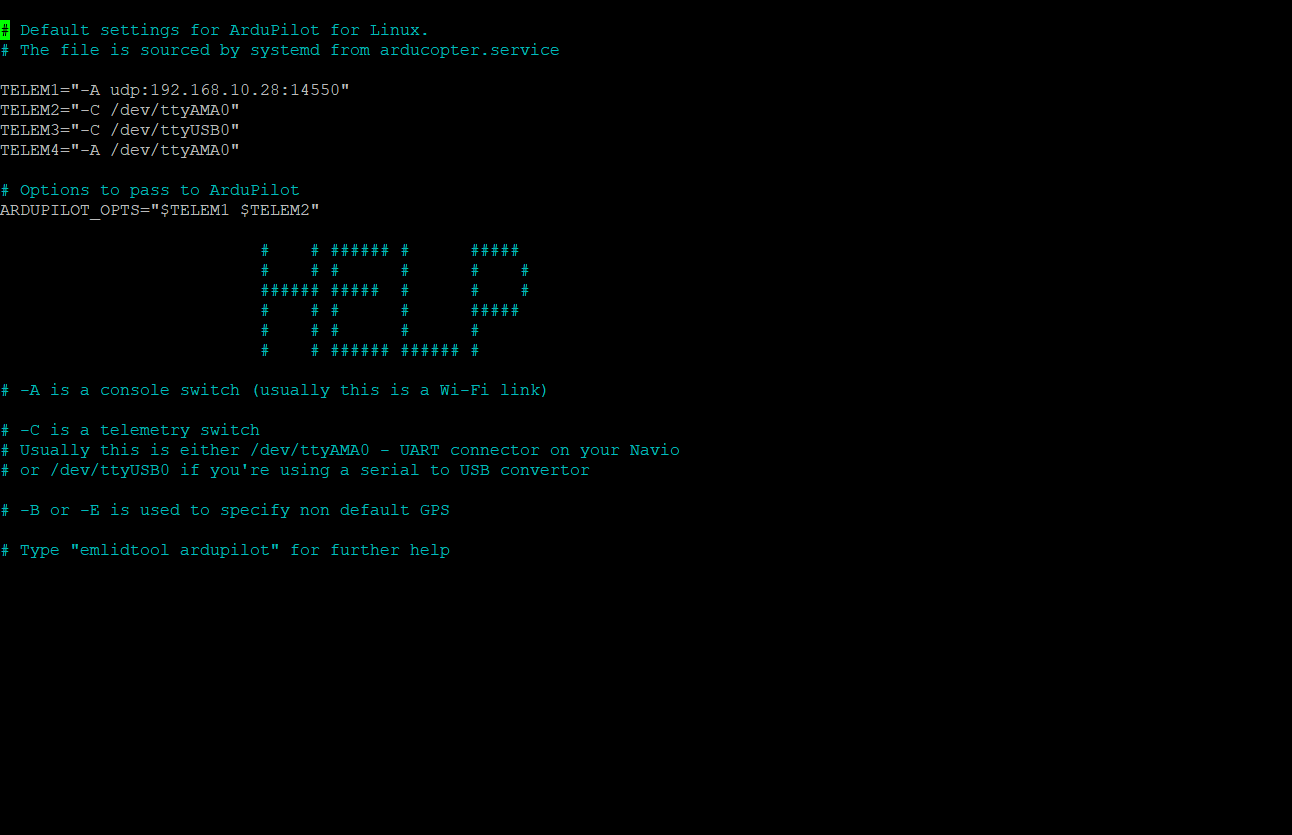
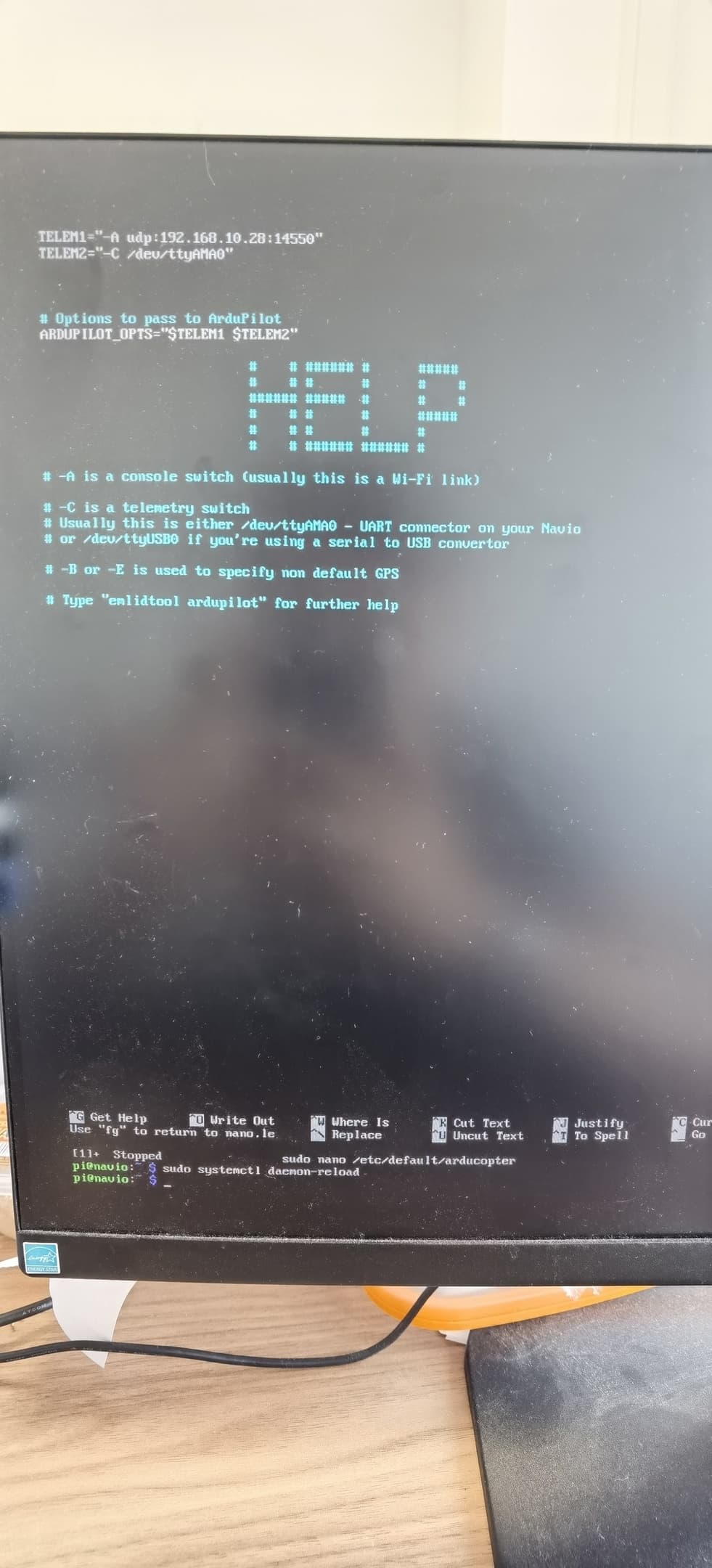
If everything is okay, please leave only TELEM1 and TELEM2 in the /etc/default/arducopter file. Then, run sudo systemctl daemon-reload command. After that, enable ArduCopter and select COM10 in Mission Planner for the connection.
Hello, I am working with Vurdlok with one drone, which is based on Navio 2, I did everything you wrote above, but unfortunately our telemetry dont want to send any information to ground station, I also check rx tx but it is right