How is ardupilot / navio configured to expect PPM vs SBUS vs some other radio input? I see no parameters related to that and I wonder if a default set to an unexpected value
How can I diagnose the issue more closely? I’d like to avoid the need for an oscilloscope but I can go to that if I have to.
A second, completely different receiver - a Radiomaster RP1 (instead of the original crossfire one). This supports only SBUS (normal + inverted).
All of PPM, SBUS, and inverted SBUS. Ardupilot says it “automatically discovers” which protocol is in use, so I have not set any parameters or flags when I switch between the two on my transmitter.
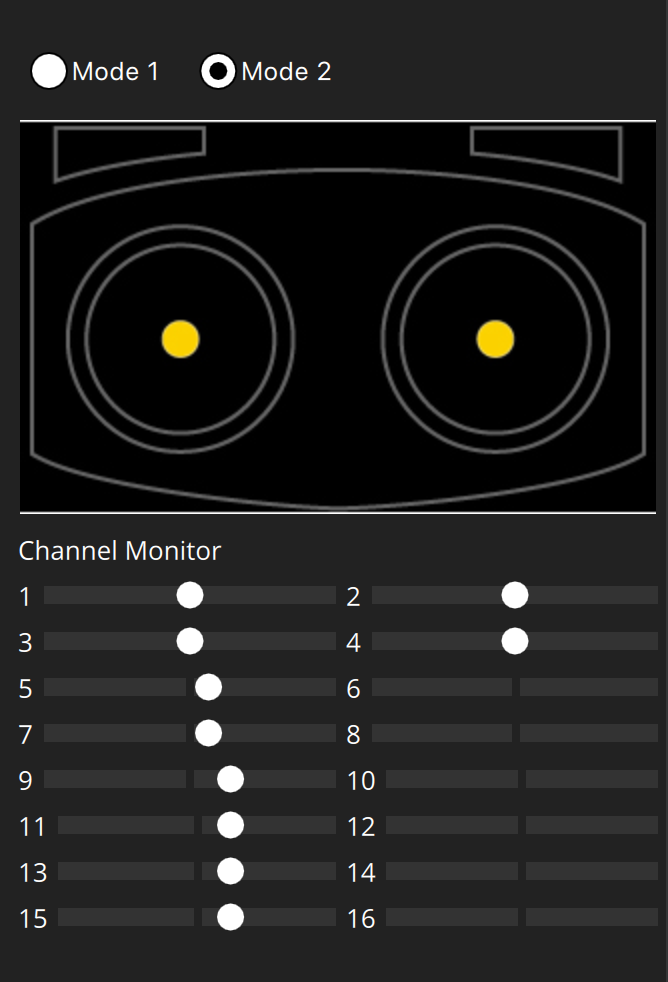
When I do switch, these controls jump around once on switch, but still do not respond to any input from the transmitter:
Hey @olesia.riman , thanks for your reply! Two parts here:
I never did figure out how to get PPM to work correctly, but I did get SBUS to work eventually - the problem I described about “it not getting through to Ardupilot” was actually that I had Virtual Joystick set up in QGroundControl, which was sending RC_OVERRIDE to Ardupilot.
QGroundControl does work - calibration succeeds for everything when I use SBUS.
I would still like to figure out how to get the Navio to respond to PPM. That is a different problem.
Since Ardupilot reads from those /sys/kernel/rcio/rcin/* inputs, if PPM RC input doesn’t affect them, that must be something wrong about the Navio or the way the receiver is connected, rather than a problem with Ardupilot, Mavlink, QGroundControl, etc
I purchased a new FS-IA6B and had this same issue. I resolved by enabling PPM on my receiver. The transmitter has a menu accessible by holding OK button. Finding this menu was my blocker.
Thank you for your patience! I’ve discussed your case with our team and it does look like an issue from the RC receiver side. I can hardly provide any suggestions in this case, as we haven’t tested such setup. Can you check the suggestions Chad mentioned?
You can also double-check that the signal is being sent from the Navio using the oscillograph.