I am looking to setup the Navio2 with a RaspberryPi with the Stretch image provided in the tutorials. I have successfully set this up and have it running ArduRover 3.2.
I was wondering if there is a way to enable the Raspbian GUI?
I have already attempted to change the boot sequence on the Pi through sudo raspy-config; though when it boots it will show a login screen, once logged in the RPi just reboots.
Our Raspbian image is very much similar to Raspbian-lite that doesn’t have GUI by default because it doesn’t make a lot of sense to enable GUI on an autopilot. Nevertheless, it can be done.
Wow! No idea how it slipped through. Yes, sure. I’ll delete in the release as well. Thanks for noticing. This is a left-over that of course should’ve been deleted.
I might have missed it, but is there a guide/script that will install all the Navio2 related stuff on top of a “blank” Stretch image ? Even better would be to have a guide/script to recreate the image with everything (ArduPilot/ROS/MAVROS, etc )
I agree! That would be a very useful feature. I’m attempting to use the Navio 2, Roboteq motor controller, HOKUYO Lidar and raspberry pi to create a intelligent geound vehicle for completion.
This is just my explanation for wanting to use GUI as it will allow me to setup ROS/SLAM.
The change is just too vast and there hasn’t been a point to release the scripts. But I guess, there’s no point keeping you guys in the dark, so we’ll release in the next couple of weeks.
Just for you guys to know, recently a couple of devs are gathering to extend the APSync/APWeb project, and also the Maverick project fnoop.github.io and I’m also extending that project to be able to run natively with the latest NavIO2 (Stretch) image as a base.
Side note:
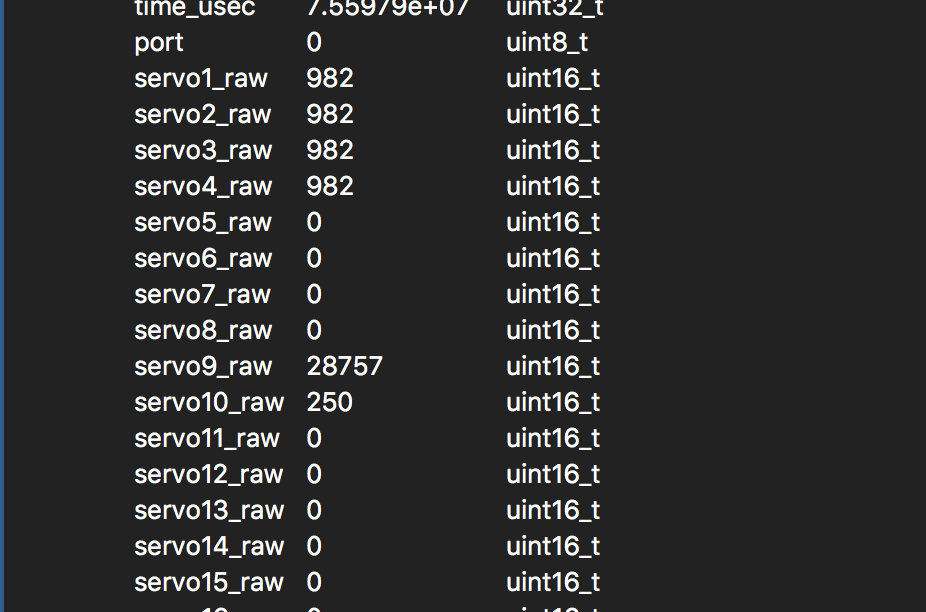
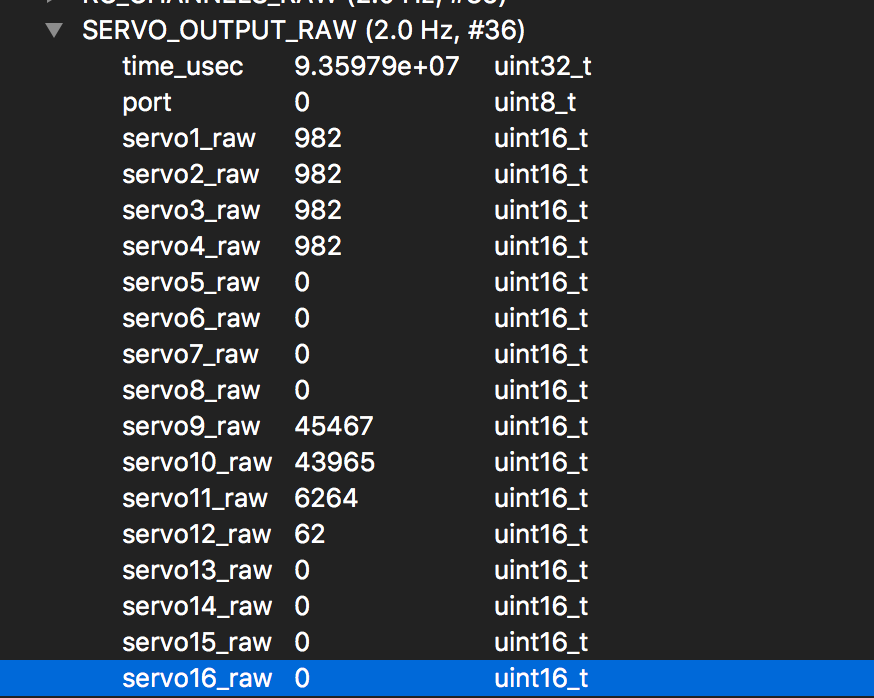
Have you guys seen any strange behaviour on the servo output pins when using Copter ?
I have a TLog recorded where we can clearly see spurious values being outputted to Servo 9 to 14, while the pins that have motors assigned behave correctly.
If you feel necessary I can open a discussion on the forum.




 I guess so, but always good to ask
I guess so, but always good to ask