



I have got a Navio2 in Sept 2017 and mounted it on a Raspberry PI 2. I have a hard time establishing a SBUS connection between my receiver (FrSky X4R) and the Navio2 card. The receiver is bound to the controller (an Taranis Q X7) Okay. However, no activity is detected on Mission Planner’s Radio Calibration page, as if the receiver was not pulsing anything. note that I’m able to establish a PPM connection between the receiver and the Navio2 card.
Is there a step by step guide that explains how to establish a SBUS connection between the receiver and the Navio2 card?
I have spent 2 hours+ looking without success.
thanks
Hi,
please take a look at this post:
I am having the same problem. I have a Navio2 on a Raspberry Pi 3. I have paired a Taranis X7 with a FrSky X4R-SB receiver. They appear to be bound successfully as indicated by the solid green light on the receiver when the X7 is on. I’ve upgraded the emlidtool software to its most recent version according to the documentation.
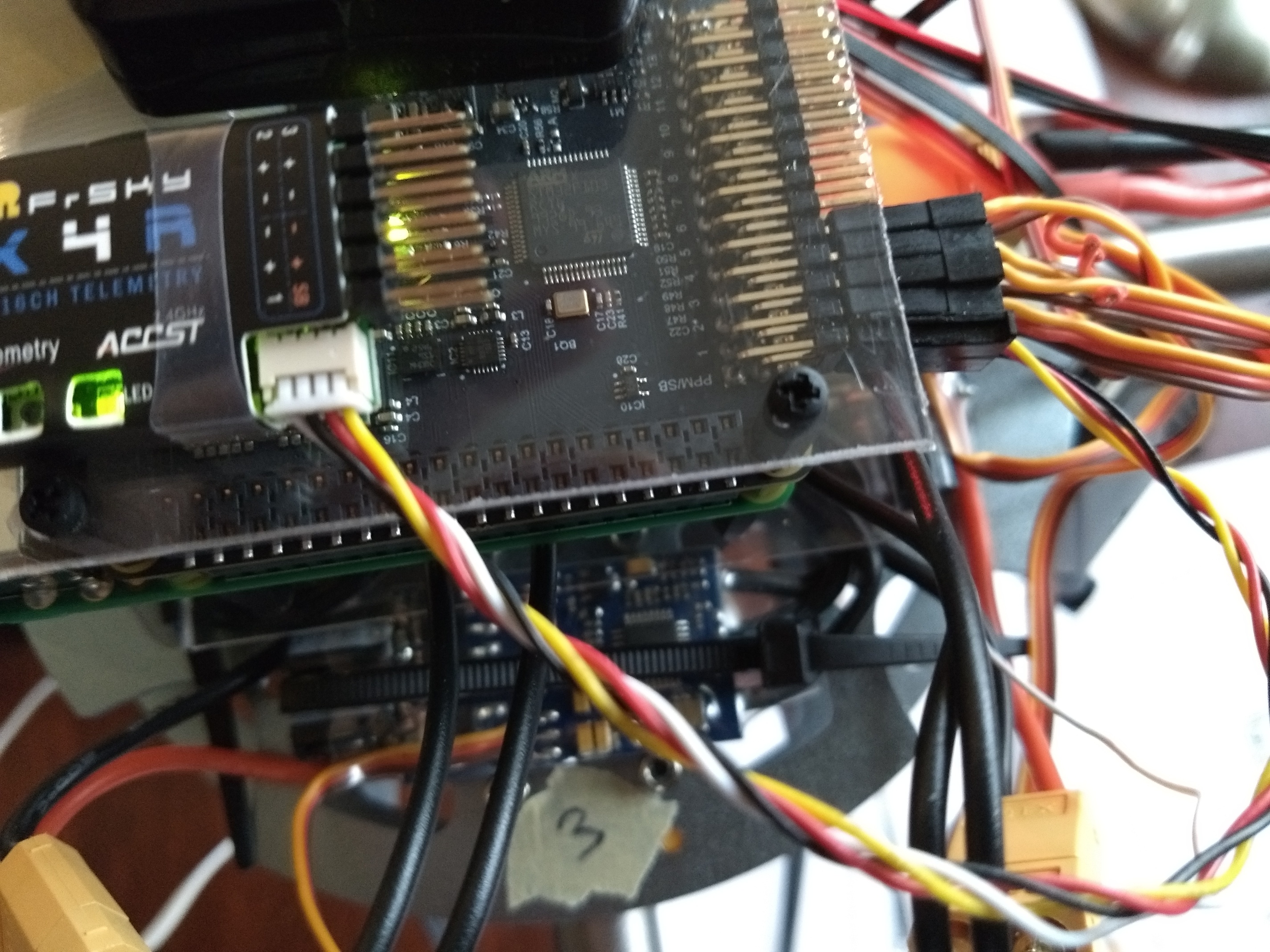
Here is a picture of the connection:
I’ve run the following tests, as suggested in the preceding post:
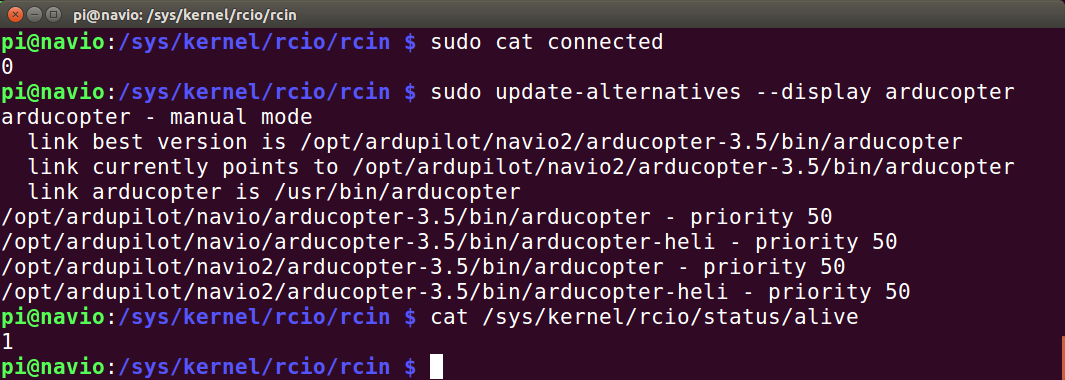
cat /sys/kernel/rcio/status/alive returns 1
cat /sys/kernel/rcin/connected returns 0
cat /sys/kernel/rcin/ch0 (or any of the channels) returns 0 – I’ve moved all dials on the transmitter to multiple positions and checked all channels – all persistently return 0
sudo update-alternatives --display arducopter gives:
Are there some additional tests that I can run (short of hooking up a scope to the SBUS pins) to debug this?
SBus port is not the white one used on your setup. Read the FrSky X4R SB documentation.
Have a look at the -+SB just above right of the white plug…
Marc
1 Like
Marc,
That resolved my issue. I didn’t read the documentation carefully - I thought that Smart port pin was the same as the SBUS pin. Thank you for the help!
David
This answers my issue as well. I wrongly assume the white connector was providing the SBUS signal where in fact the connector on the right side does. thank you very much.
Alex