This still seems to be an issue. There are alot of posts about this but it still seems to be a problem. I’m still getting inconsistent compasses error. When calibrating the compasses as per Onboard Mag Calibration in Mission Planner. Compass 1 has super high offsets and compass 2 has ok offsets. Even when disabling compass 1 and only using compass 2, I get red/orange levels in the EKF chart with small movements.
Sure, I can try an external compass but I would like the Navio2 internal compasses to work!
Have you tried calibrating outside of any buildings? Otherwise, there might be magnetic interference.
Please, don’t take into account high offset values. These actually don’t mean a thing. This is an artefact from ol calibration code. We’re working on getting rid of these warnings. I repeat, they are not meaningful in this context.
Hi George, thanks for your help. Yes, calibrated inside and outside … similar high offset values.
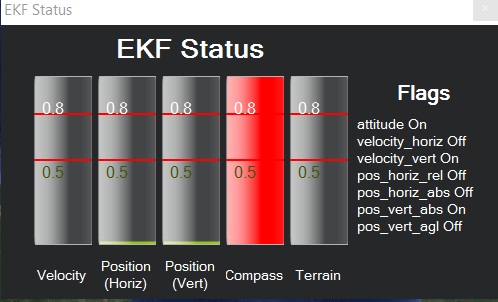
I can’t ignore the high offsets because if I have the copter still, the HUD display shows slow movement of the heading. This happens with compass 1 & 2 enabled and used as well as if I just use compass 2 (lower offsets). With both compasses enables I get 'compass variance" error too.
The EKF values jump into the orange and red section for small movements, so I’m not confident to fly with these issues.
Any other thoughts? I’ve reimaged, reinstalled firmware and still the issue persists.
try to place navio away from all metal stuff on your copter; cables screws all metal parts can be magnetic and interfere with earth’s magnetic field; (magfield 300-400 is the goal - although 500 should be flyable too)
your compass is only needed with certain flight modes eg stabilize doesn’t rely on your compass; pos hold relies on your compass; you can test in stabilize mode and at about 3meters switch on poshold; if your compass is picking up bad values, your copter starts “toiletbowling” circling over and over
though aluminium is rf-reflective, it does not shield very good for magnetic fields; also you would shield part of the magnetic shield if you try to shield your navio like that; if you wanna shield your magnetometer look into mu-metal;
magfield over 500 indicates another magfield than earth’s; (which would be between 300 and 400)
actually you would place a piece of mu-metal under magnetometer in a certain distance; you would have to do a little googeling and testing of the best distance and placement to your magnetometer, but it can improve your mag’s values especially on high power copters;