For almost a year I have been trying to get Navio2 connected for my Robot. I have 2 of them, a Reach M and 2 Reach RS+. My current setup is a Reach RS+ as a base station. One RS+ connected to a Navio2 and the Navio2 connected to Reach M for another robot. It has been more than frustrating. Each time i invest a day or so, hit a wall and put it back on the shelf. The problems have varied and below are the latest attempt.
I’m going to give this one last try and I obviously need some help.  In this attempt i’m starting from scratch and cannot get it to work because of two problems:
In this attempt i’m starting from scratch and cannot get it to work because of two problems:
- I’m unable to get the Reach RS+ connected to Navio2 via USB.
- The compass is all over the place when operating. So can’t use the compass for navigation.
For the purposes of a complete picture i’ve mentioned both problems but i’m going to focus on problem 1 for now.
I was starting with a fresh rpi image that i installed in Jan of 2020. It’s the one from November of 2019 (latest as of now). I’m operating on a rover so i’m using Ardurover.
Problem 1 - Navio2 + Reach RS
I have followed a couple of sets of instructions for this and tried every combination. The problem is Reach is not making it to ArduPilot. Below is my current setup.
Reach RS+:
Position Output
Device: USB-to-PC
Baud Rate: 38400
Format: NMEA
Ardupilot:
My /etc/default/ardurover
TELEM1="-A udp:192.168.2.52:14550"
#Reach RS via USB.
#-A - serial 0 (always console; default baud rate 115200)
#-C - serial 1 (normally telemetry 1; default baud rate 57600)
#-D - serial 2 (normally telemetry 2; default baud rate 57600)
#-B - serial 3 (normally 1st GPS; default baud rate 38400)
#-E - serial 4 (normally 2nd GPS; default baud rate 38400)
#-F - serial 5
TELEM2="-E /dev/ttyACM0"
# Options to pass to ArduPilot
ARDUPILOT_OPTS="$TELEM1 $TELEM2"
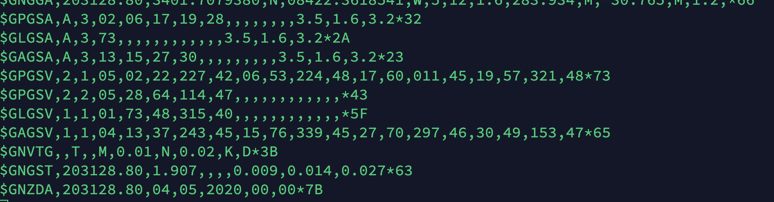
Output from my dev directory
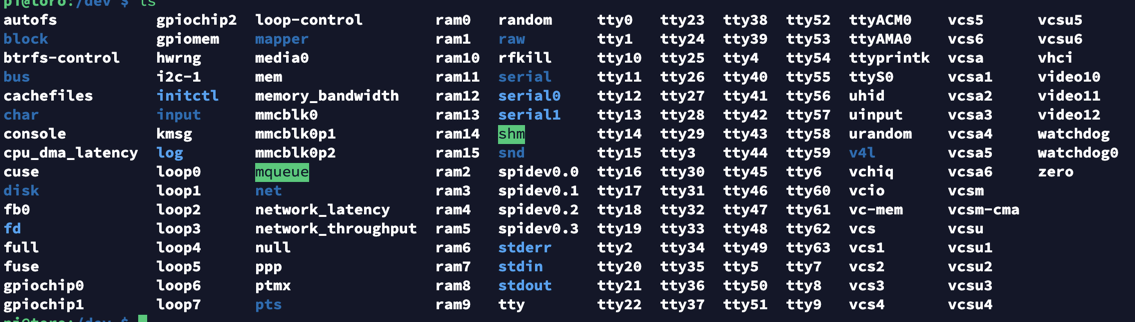
a snapshot of screen /dev/ttyACM0
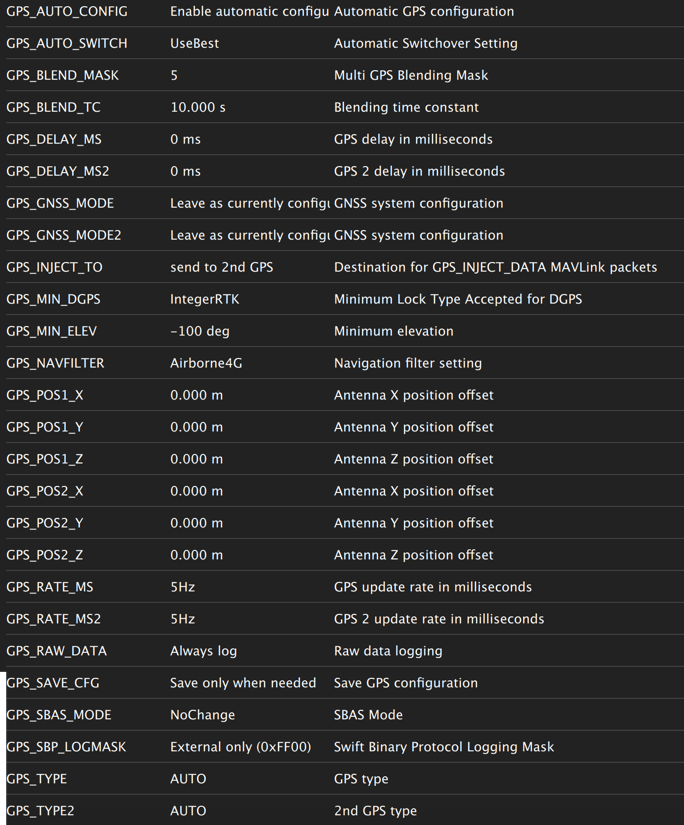
My Parameters from Ardupilot:

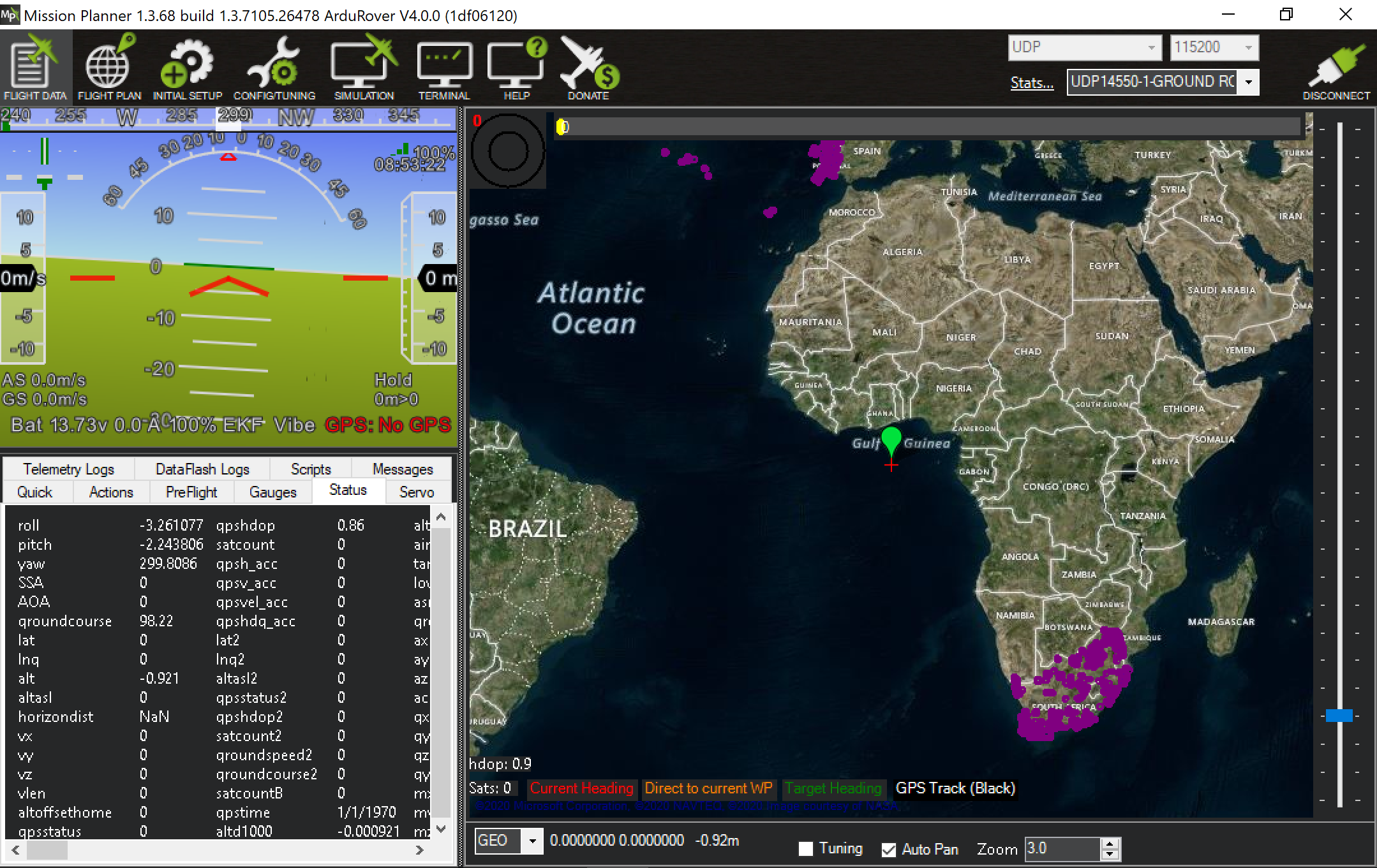
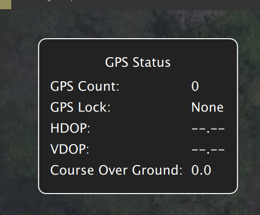
Result:
And there is no GPS reading for the vehicle at all. it does not show on the map.
At one point i had the built in GPS working but that has since stopped working. I have modified so many things trying to get this to work that it’s possible several things are wrong at this point. Any help is much appreciated.
-B