



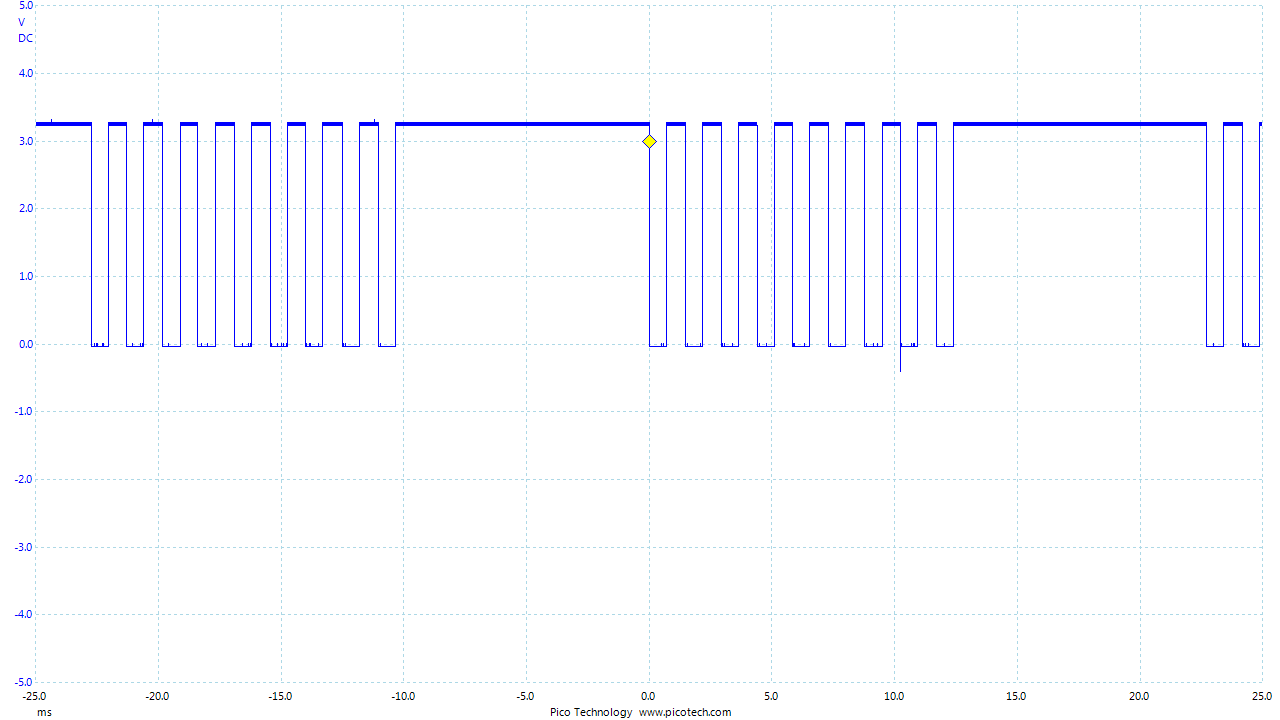
What are the PPM frame requirements for Navio2? I’m using a 22.5ms, 8 channel frame and it’s not recognized by the PPM decoder.
Here’s my frame, the 8 channels are 12.5ms long with a 10ms sync.
Here’s the version:
Linux navio 4.4.6-4d0ae01-emlid-v7+ #3 SMP PREEMPT Wed Apr 6 13:25:26 MSK 2016 armv7l GNU/Linux
pi@navio:~ $ cat /sys/kernel/rcio/status/alive
1
It says it’s alive?
pi@navio:/sys/kernel/rcio/rcin $ sudo cat connected
0
Shouldn’t that be a ‘1’? How does it decide to mark it connected?
pi@navio:/sys/kernel/rcio/rcin $ lsmod
Module Size Used by
cpufreq_stats 3463 0
brcmfmac 185969 0
brcmutil 5725 1 brcmfmac
cfg80211 438534 1 brcmfmac
rfkill 15930 2 cfg80211
rcio_spi 2576 0
rcio_core 2231 1 rcio_spi
rcio_rcin 2184 1 rcio_core
rcio_adc 1556 1 rcio_core
rcio_pwm 2711 15 rcio_core
rcio_status 1545 1 rcio_core
bcm2835_gpiomem 3036 0
spi_bcm2835aux 4779 0
bcm2835_wdt 3225 0
spi_bcm2835 7222 0
i2c_bcm2708 4770 0
uio_pdrv_genirq 3100 0
uio 8256 1 uio_pdrv_genirq
i2c_dev 5859 2
I believe all the correct modules are loading, but below shows no RC input at all.
pi@navio:/sys/kernel/rcio/rcin $ ls
ch0 ch10 ch12 ch14 ch2 ch4 ch6 ch8 connected
ch1 ch11 ch13 ch15 ch3 ch5 ch7 ch9
pi@navio:/sys/kernel/rcio/rcin $ sudo cat ch0
0
pi@navio:/sys/kernel/rcio/rcin $ sudo cat ch1
0
pi@navio:/sys/kernel/rcio/rcin $ sudo cat ch2
0
Is there additional configuration for the PPM input that I’m missing?