Problem 1
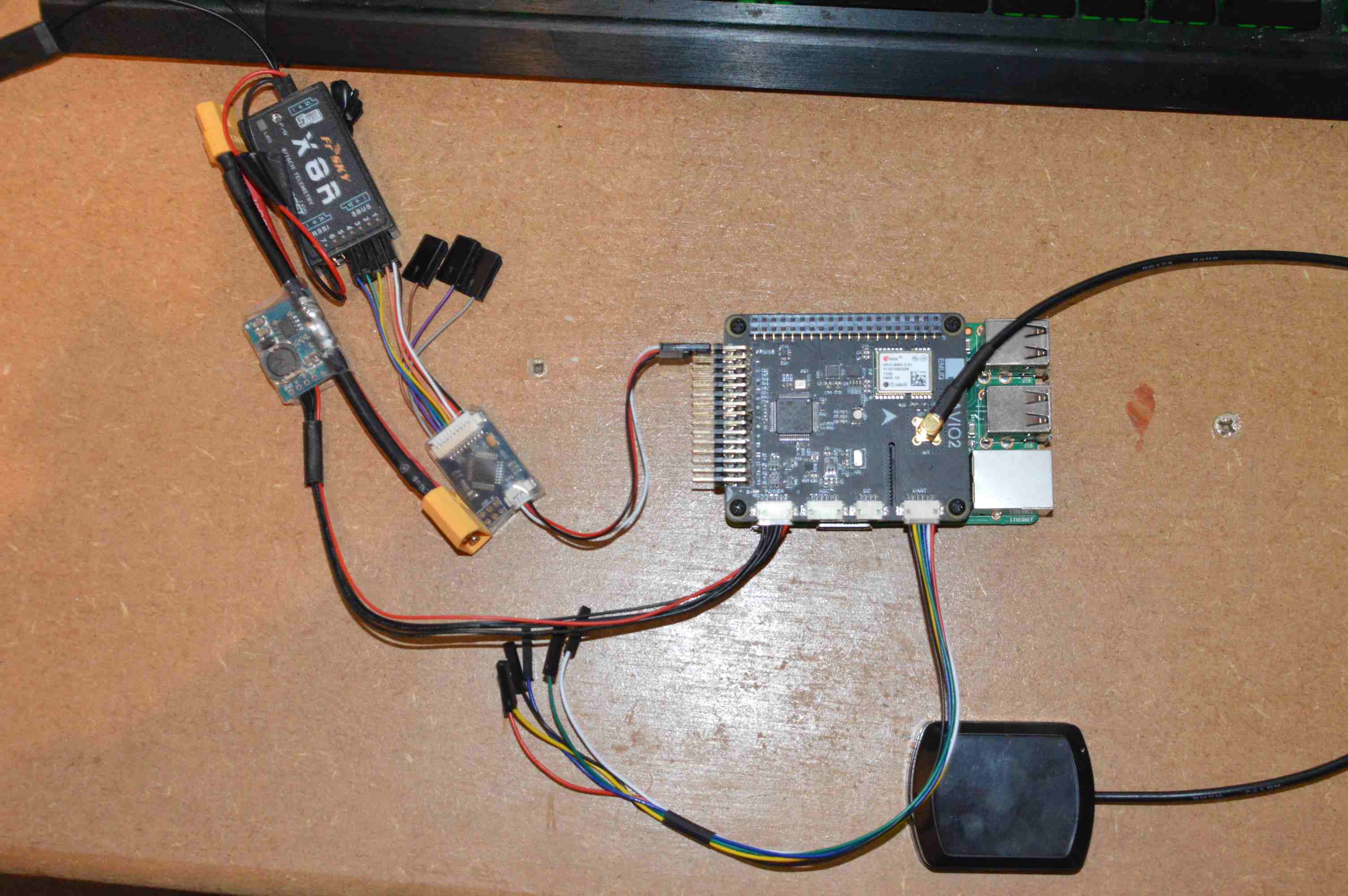
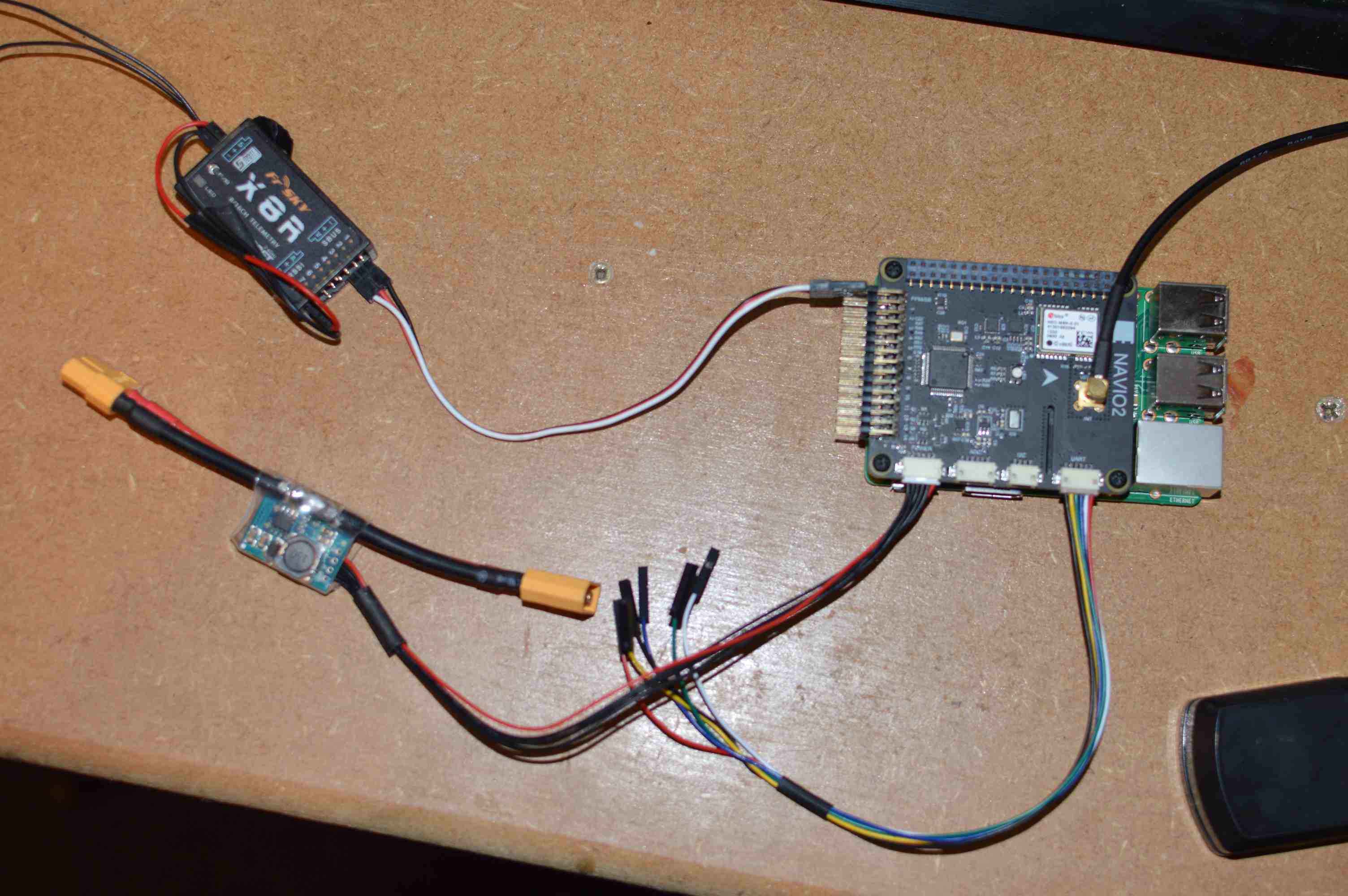
So i’ve just received my NAVIO2, after configuring it to run APM I encountered some problems. I’ve been trying to connect my Frsky Taranis - Plus to the NAVIO2 through the X8R receiver. It appears that the NAVIO2 isn’t detecting the Sbus input. I have also tried several receivers one being a RMILEC R4047NB20. I would appreciate it someone would help me troubleshoot. I’m connecting to theNAVIO2 through the ethernet port using mission planner.
I have also used;
git clone GitHub - emlid/Navio2: C++ and Python sensor examples for developers
cd Navio2/C++/Examples/RCInput
make
sudo ./RCInput
and receive continuous 0 with approximately one second delay.
Problem 2 >Fixed<
after successfully installing the APM firmware onto the NAVIO2 I can successfully launch the application using the command: sudo ArduPlane -A udp:192.168.1.2:14550 -C /dev/ttyAMA0
However I have to use this command each time after rebooting the raspberry Pi. I’ve tried autostart in the APM through the code: sudo ArduCopter-quad -A udp:192.168.1.2:14550 -C /dev/ttyAMA0 > /home/pi/startup_log &
and it starts the APM firmware however after restarting the raspberry Pi the firmware does not start-up automatically. Any ideas?
Placing the OS image into my Google drive, why this happened i have bo idea but re-downloading it and not placing it in my Google drive fixed all my problems.
I hope this helps
Thanks
Nathan_Belk & ivereninov for all the help you have given me <3