I am a noob in drones. I built a Tarot 650 with Pi2 and Navio2, did the ESC calibration (all at once) and the ArduPilot calibration using MissionPlanner. The problem I have is that the drone always crashes when I try to take off in stabilize mode.
In MissionPlanner everything looks good to me, the trims are within the limits I find on the internet. The quadcopter will lift unevenly, sometimes it crashes to one side, when I try to compensate with the radio, it crashes to the opposite site. The propellers are in correct configuration (opposite props are the same config) and the thrust is in the correct direction (all props lift).
Do you know what could possibly cause this?
How do I know if I connected the ESC to the correct pins on Navio2? Does the order matter?
I also tried flying the quadcopter by holding it in the air with one hand, and once I try to rotate the drone in the level plane, one of the motors speeds up dramatically, trying to destabilize the quad. It feels like the compensation for such a small move is too large.
Hi mate,
Have u calibrated ur RC, board levels? Check ur PIDs. As an option, just reset all settings to default and tune RC, ESC, levels again. Might be u have to balance ur props. What about FC damping? Coz any vibrations cause problems with accelerometer reading.
The other possibility is that your RC transmitter mix is wrong. Most transitters should be set in ‘plane’ mode not copter mode. You should then check in Mission Planner that each of the stick movements produces the correct travel on the RC calibration screen.
If the copter already goes into a certain direction after take-off the reason is in most cases a motor problem, a very unbalanced build, or vibrations.
Starting here by adjusting the PIDs is not right …
I am waiting on my prop balancer to balance the props. I will also check the motors for balance. Plan to use smaller props to minimize the sudden tilt to the side and troubleshoot better.
I have one question - does the direction of the navio2 relative to the quad horizontal axis matters?
Currently the navio2 is flat, and is on the anti-vibration pad. The accelerometer calibration using Mission Planner was successful.
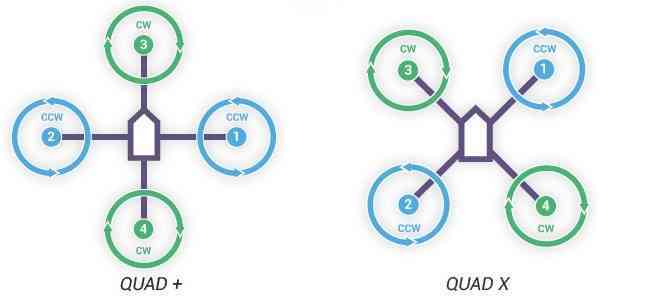
First things first are your motors in the right order?
positions 1,2,3,4 in the diagram should be connected to the navio pins 1,2,3,4. the navio should be pointing forward (it has an arrow on the board, USB ports face forward) like in the diagram above.
flipping is very unlikely caused by unbalanced props or vibrations. Seems a fundamental is missing that the quad can’t know. If it’s letting you arm.
There is a motor test that starts up each motor independently in mission planner under optional hardware (try without props) in case you’re unsure.
The motors spin direction and props are in correct order (I have a Quad X config), I connected them to pins 1-4 but in random order. Also, navio2 is sideways, not pointing forward. Could this be the reason behind the failing launch?
I will update the configuration and test again.
APM has to know where Navios sensors are pointing, so it is very important to configure this parameter right. Look for AHRS_orientation in the full parameter list. The different orientation values are explained in the tooltip.
It was a success! Thanks for all the suggestions.
After following the correct configuration of the motors and PVM pins on Navio2, I was able to fly my drone for the firsts time. I still needed to tie a small weight to one side of the drone for balance, and adjust the roll at takeoff, but after about 20 cm clearance the balance was ok on its own. The correct connection of the wires allowed me to know which radio control will results in which maneuver relative to the front of the frame, so it was easy to adjust the balance for take off.
The drone went about 200m high and 100m horizontally, scaring the shit out of me. I thought I was going to lose this thing on the maiden flight. Luckily I was able to bring it back and land.
Next I am putting the GPS back on and a camera with streaming. With just the radio and no geo-fencing and live video stream it is too scary for a noob like me to fly this thing.
The throttle response was a little slow, although the drone should be more than 1kg. I am using 620 KV motors and 12x4.5 props. I will try a new set up with raspberry pi 3 to see if it improves the response.