I recently bought the navio2 , and was trying to set it up and calibrate it,
but i think i have messed up few steps provided in docs page regarding this ,
I am trying to build a quadcopter and plan on using it with a pi2 with both short-range (WIFI) and autonomous flights (over 3G/4G dongle) ,
I formatted and loaded the image provided on docs and the pi is running .
I updated it and upgraded it as it was mentioned ,
I didn’t quite understand the part with the “SSID” wifi configuration , is it about making a the pi a “hotspot” or simple connecting the pi to the internet ,anyway i plugged in the Ethernet cable to do the internet jobs.
I typed “nmap -sn 192.168.1.*” to find my pi’s ip address but it responds “-bash: nmap:command not found”
I installed the navio2 apm.
4.When i try to start the APM with “pi@navio: ~ $ sudo ArduCopter-quad -A udp:192.168.1.2:14550” ,
i get the response " Raspberry Pi 2 with BCM2709! Unknown option ‘?’ "
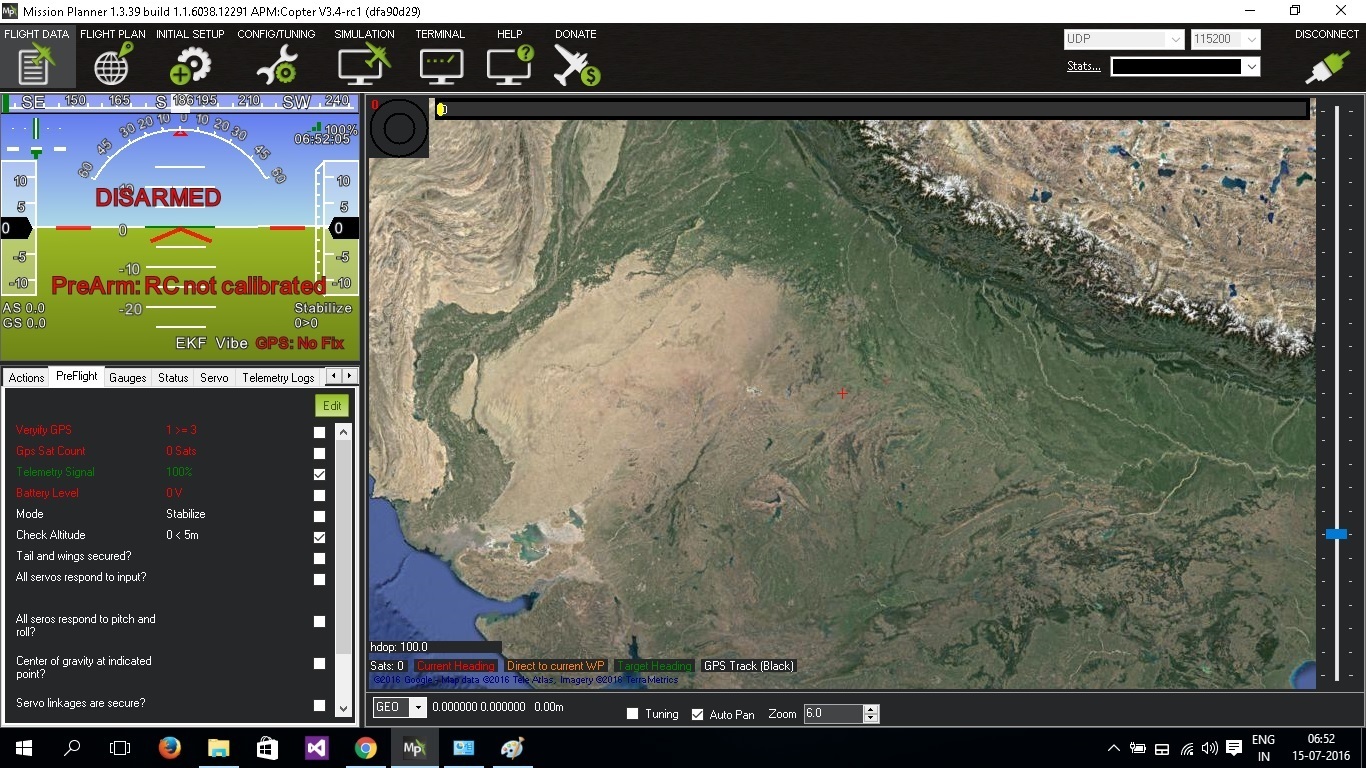
5.Connecting to Ground control station i have both apm planner and mission planner installed on my laptop through which i intend to to control the quad , But i don’t know how to connect to any of them and m confused about it.(UDP or TCP), and how would all this work out to be in terms of arming it,flying it and so on.
(just for my knowledge , can we connect it using TCP?)
I am not sure how to go about it , and i was not able to particularly find any specific solutions on the docs page , could anyone please walk me through it and help me setup the navio2 .
And i have few questions aswell ,
Do i need to a RC controller to fly this or can i fly it directly through the base station on auto mode and joystick manual mode? (i haven’t bought any rc controller ).
Does it have its own power sensors that can tell me the voltage of the battery supply and shut down the pi automatically when the power is low ?
3.Can i add additional sensors onto it like proximity sensors and etc on the pi and how do i go about programming it and integrating it with the apm with regards to the flight inputs (lets say)?
This is you wi-fi network name to connect Raspberry to it.
Are you running this command on your computer or on RPi? It looks like nmap is not installed, you can install it using apt-get.
Which method did you use for install? Using apt-get?
Please check that you typed in the command correctly.
When running ArduPilot you need to enter the IP address of the GCS and in GCS enter the same port number.
We recommend using a RC controller, especially if you are a novice.
You can use the power module which could be ordered with Navio2. It will monitor battery voltage and current and can trigger failsafe if battery is low in flight.
I tried it again and it seems like i was making few errors.
Now the APM seems to be working …
i used apt-get…
well ill be working my head around this… but i got a request, can you make a tutorial video for the whole setup? it would make things much more simpler for total noobs like me ,it could be a complete walk-through and could give sure shot insight for each step right from unboxing to GCS to flight!!.. PLEASE DO!!..
and thank you for your help!!.. will be asking more question as i tread along!..
So its connected how do i about it further?
The GPS will be working under open sky,
how would i calibrate it ?
and what else do i need to do before plugging in other parts ? .
right, so its been a while since then , the navio 2 is configured and ready to be used, i have few questions about the rc connection though,
i have bought flysky fs-i6 and (what appears to be a standard 6 channel receiver ) fs-ia6 (in a box pack) ,
i know that navio accepts only ppm signals , so bought a generic ppm encoder (of Chinese make)
What i want to know is , how does it work, as in , i read in other threads on the forum that the receiver would need power ,
Will navio provide the power or would i need to power it separately?,
and for the transmitter since i’d be using a encoder ,
Would i need to choose ppm in the settings or use it as it is since i am using an encoder?(i know this question might not qualify inside the domain of this forum but your opinions are always welcome )
The transmitter knows nothing about the encoder. If there is a setting called ppm in the transmitter menu, it most certainly means sending the a ppm signal to the trainer port instead of the internal rf module.
I just read, you will need an IA-6b v2 receiver to support direct ppm output, without the encoder






 )
)