Hi Everyone,
I have flown my Tarot 650 for about 10 times now with Navio2 + pi2. After updating and upgrading to the latest arducopter last week, the quad is not stable at all. It rotates around its axis in stabilize and loiter modes. Also, with a small throttle input it seems to violently climb. I have been using the same radio setup, recently added an external GPS and compass, and calibrated everything before the flight. Had external compass error of about 3, which was much better than the internal compasses that we around 11 (I was using all 3, but external as primary).
The last flight the quad made a sudden climb, rotated and rolled around and did a hard landing, broke the landing gear.
Which logs should I look for determining the cause of crash?
Sam.
Hi,
I would recommend redoing the calibrations and posting the binary onboard logs.
Hi Ivereninov,
Thanks for the quick reply. I will re-calibrate and try to fly this weekend. I have attached the log of the event. There are many strange things with yaw, EKF, AHRS etc. I don’t know which one is the “cause” and which the “effect”. Is it possible to infer from the logs the cause of this instability?
navio2pi2tarot650_160ct2016.log (3.7 MB)
The binary logs are here:
16-10-16_14-59-18.bin (1.2 MB)
Many thanks again,
Sam
Hi Sam,
What version of ArduPilot had you been using before upgrade and after?
Have you used an old parameter list after upgrade?
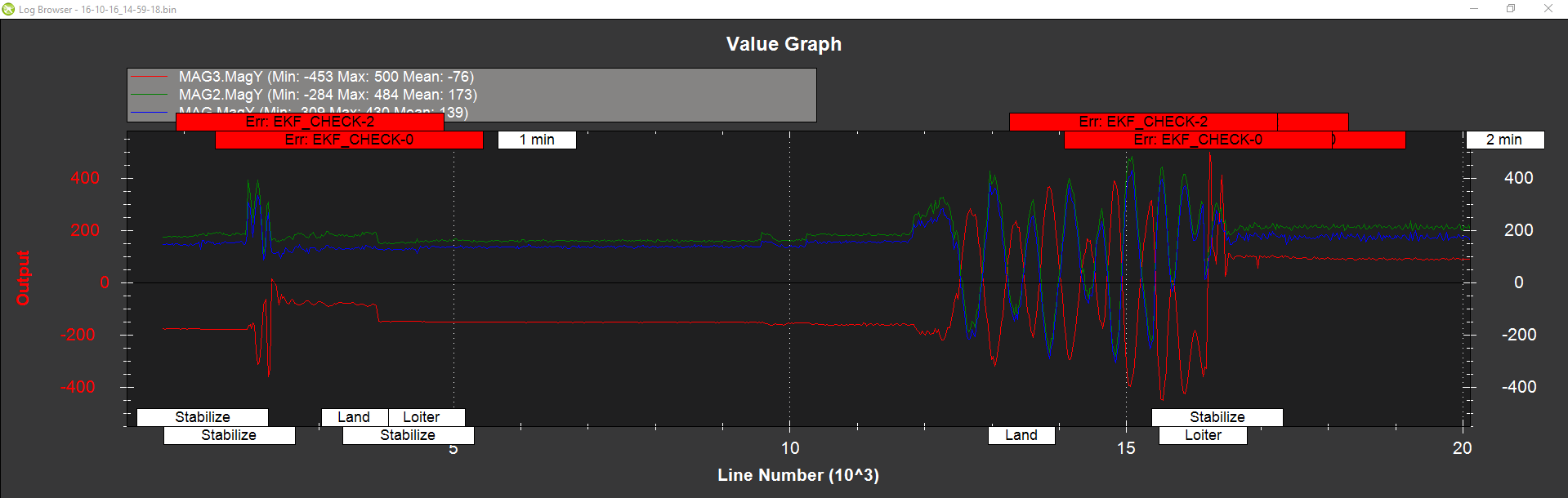
Either way, you have set wrong orientation for third compass:
All axis should report aligned results. And this is not the case at the moment.
Hi Alex,
I am running APM:Copter V3.4-rc4 (9ea82ab9) FW Ver: 120 now. I am not sure what was there before, but I try to update every few weeks using “apt-get update && apt-get upgrade”
I did not load old parameters manually. I just upgraded to 3.4 and then connected to APM planner and re-did the mandatory calibrations. Is this the wrong way to upgrade? I know some people save their parameters before the firmware upgrade, but I do not know if it is necessary. I did not save any parameters.
Thanks for looking in the logs - the external compass does look wrong orientation, but it should not. I mounted an external compass and GPS combo, and the direction of the arrow on the external compass is the same as the Navio2. Should I tick the “rotate 180” box in APM planner for the external compass?
For the 3DR GPS - like designs yes, but it depends on how is compass chip soldered in the board.