Hello,
after about one month since i bought my navio2, all that time i was slowly progressing and getting to know about how to setup navio2. I managed to set telemetry transfer and video transfer as well through 3g network.
However, yesterday i finally put my navio2 onto my quadcopter and started doing a compass calibration according to your docs using onboard calibration process of mission planner. I realised that compass1 was not getting updated with green values. Then i tried to power off and on again navio and i realised that suddenly APM couldnt even be autostarted but could neither be manually started using the command sudo ArduCopter-quad -A udp:xxx.xxx.xxx.xxx:14550 as it was returning NO INS backends available. So i went to sleep
Today, I powered again my quadcopter and the APM autostarted normally as expected. But again when i tried to make the compass calibration through mission planner compass1 would still not get updated with green values but it was showing red values. THen, again when i rebooted navio i couldnt autostart again APM. So I decided to format my sdcard and install from scratch raspbian image (using the latest image 20160718) and APM according to your docs. After a fresh install again i couldnt start APM because I was getting the same message NO INS backends available
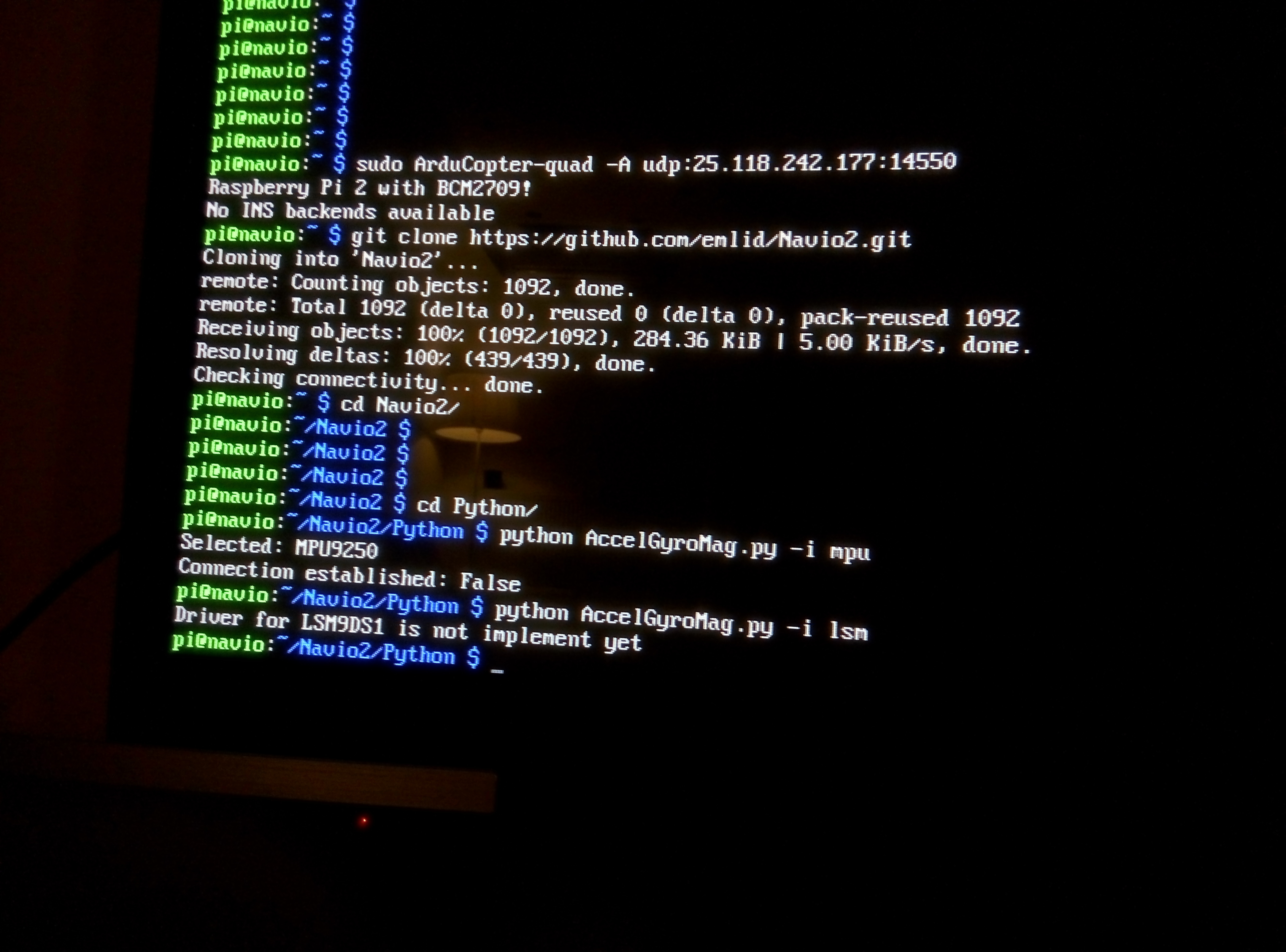
SO i decided to run the navio2 examples that you offer. THe result of running these examples is shown in the attached image. I am confused and i dont know whats going on. Why APM cannot get started and why does compass calibration never updated compass1 values??? For a whole month I never had problems starting APM and never received this message NO INS backends available . Why does it suddenly start to appear ??
THe above issues occur no matter if i supply power to navio through microusb or through the power module.
Please advise
Thank you