I am trying to connect the NEO-6M GPS/Compass specifically the compass to the I2C port but it seems there is a conflict with the barometer, which I assume is also using the I2C.
Does anyone know how to get them working in harmony?
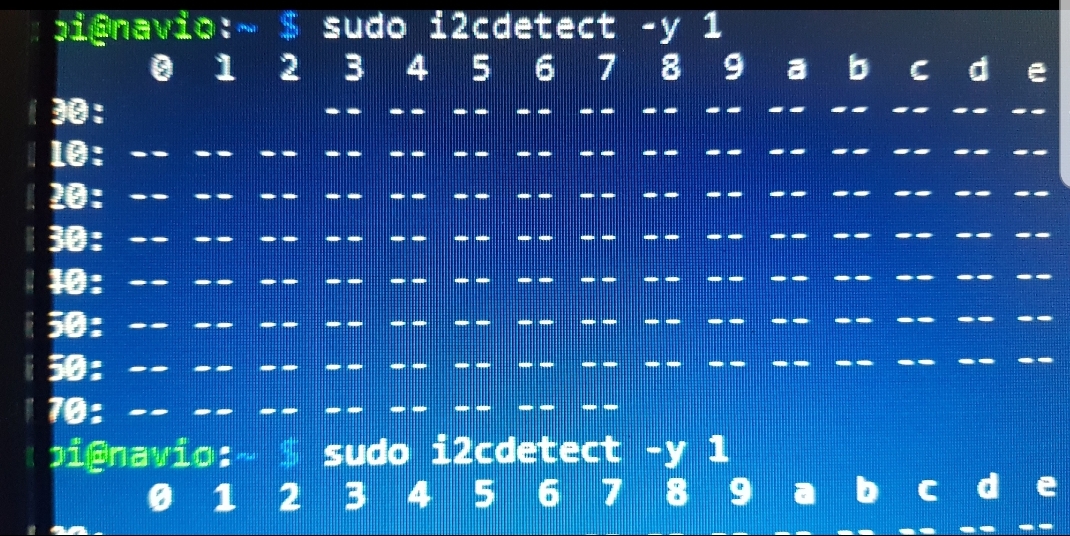
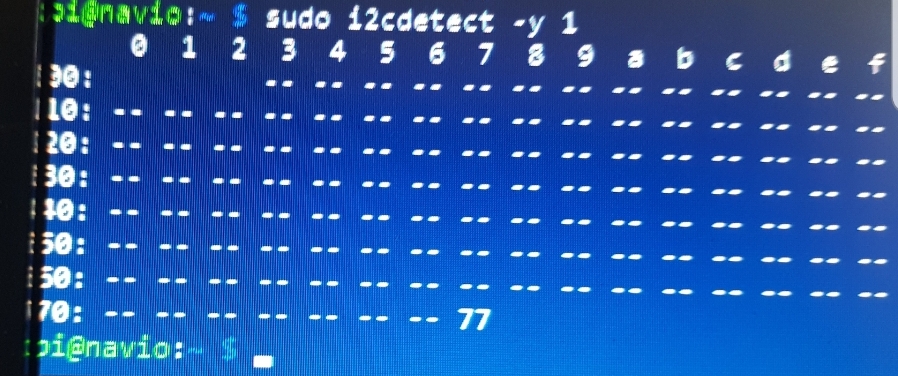
With the NEO-6 connected (I2C) this doesn’t finish and is really slow. If I disconnect it’s super fast and 70:7 = 77, otherwise it slowly gets about half way and freezes.