It is necessary to provide following information to get help:
Firmware image and ReachView version.
2.5.2-r0
Detailed problem description. How is expected behavior differ from the observed one?
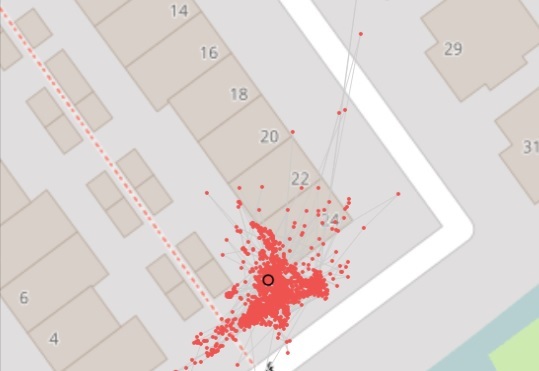
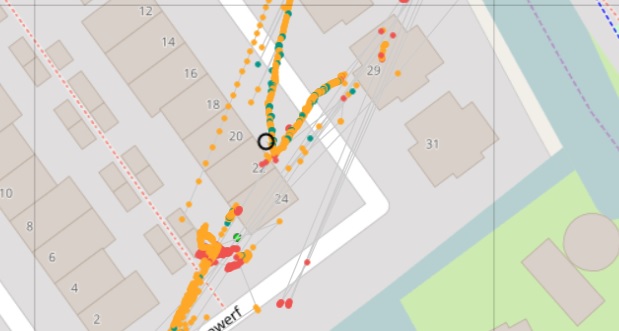
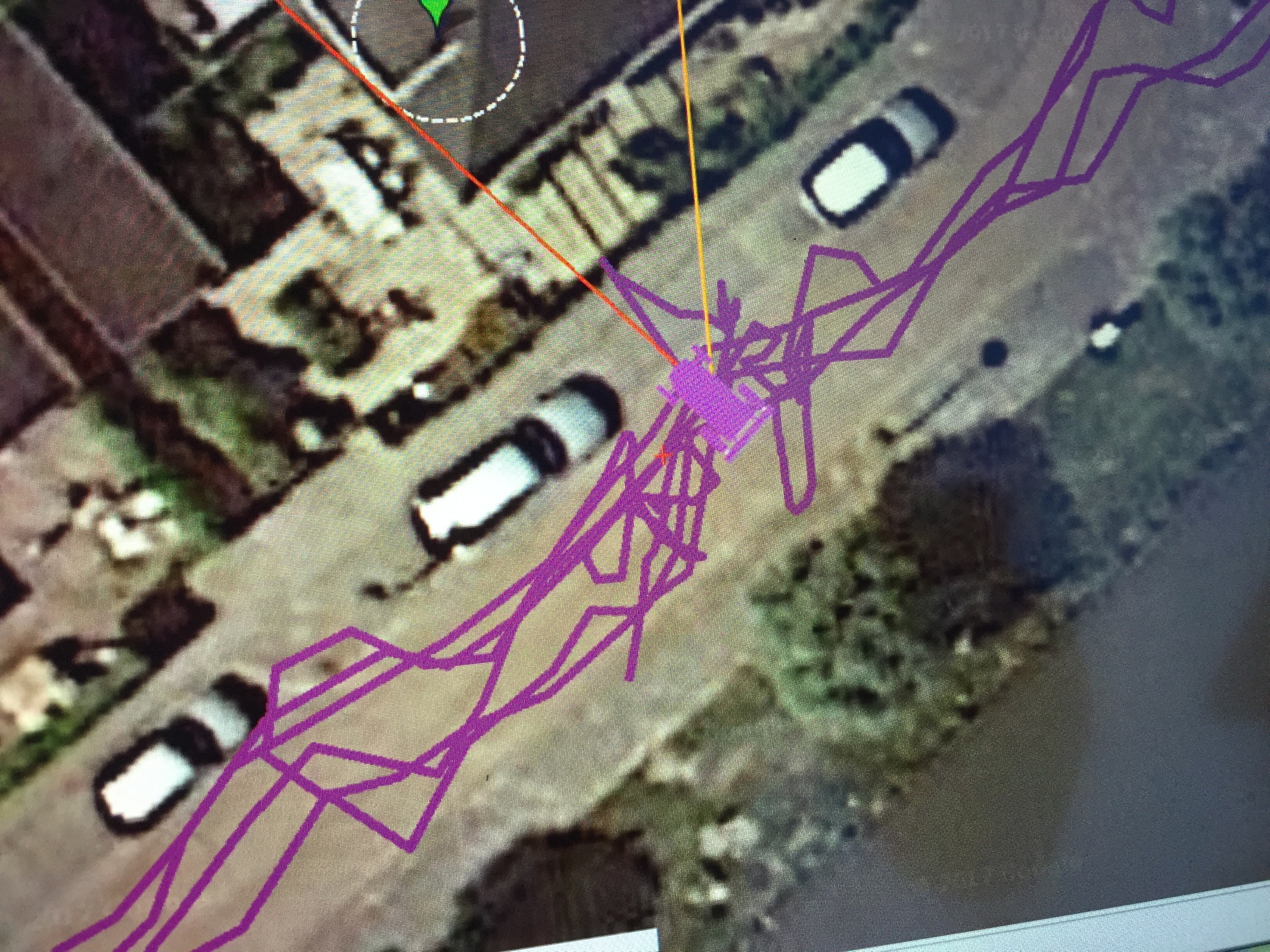
In mision planner the rover jumps around, like when it has no rtk gps connected. Mission PLanner is connected to the base module and GPS inject function is getting data. When connecting to the reach modules via wifi, the remote is getting a base position, and the base has a gps lock.
APM rover starts like so:
Init HOME
EKF2 IMU0 is using GPS
EKF2 IMU0 Origin set to GPS
GPS 1: detected as ERB at 38400 baud
APM:Rover v3.1.2 (6be45444)
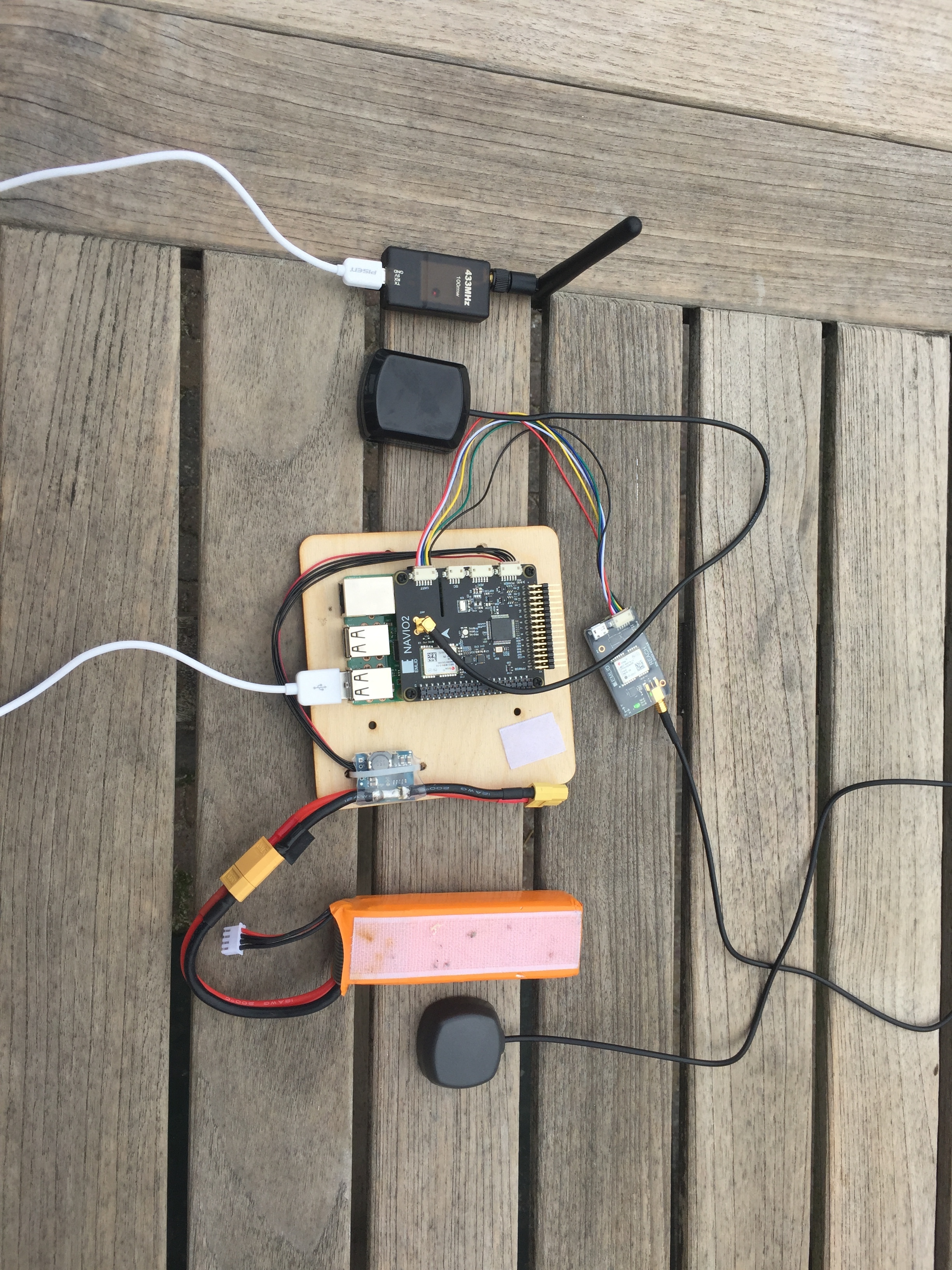
I covered a piece of cardboard with aluminum foil, stuck it under the antenna and then put the antenna on the roof of the shed. GPS is still shaky. Should the reach module be perfectly horizontal?
Try to place the antenna higher on the rover. “Antenna is king”
Start testing in a more open area, check your positioning in ReachView. Very low antenna position is challenging from RTK perspective due to signals blockage and short range multipath, this is why you would normally see antennas mounted on poles or tripods.