



i’m so new about drones and i would like to learn everything about this. and when i search a little bit, i learnt that navio2 is the best for me. but aproxieametly 2 months i’m trying to do my drone but unfortunatelly it’s not flying. i’dont know where is my fault.
i choose this parts;
Raspberry pi 4 2GB Ram - 32 GB MicroSd
Navio2 Set and GNSS antenna
Matek PDB
SunnySky A2212 motors
BLHeli 32 1200Dshot ESC
FlySky FS-İA10B Receiver
FlySky Nirvana 14 CH Radio
Fs-X8B - Receiver(this came with the radio but its connectors are different so i tried the other receiver. these days again i’m tring this receiver but i still couldn’t bind with my radio. on the other hand i can bind my radio with FS-İA10B. wheni use fs-ia10b, i’m trying to take a signal from navio2 and i can take signal. and when i connnect the motors to the receiver it is also working but when i try to connect receiver with navio2, i cannot control the motors. and when i ty to connect misson planner, i can connect but i cannot load or test any motors. i don’t know where the problem is. but sadly other thing is radio is a little bit strong so i cannot adjust it.)
Hi @mesutarslan983,
Could you clarify whether you completed radio and ESCs calibration?
Also, may I ask you to share your hardware setup photos?
thanx for your answer. of course i will send you my hardware.

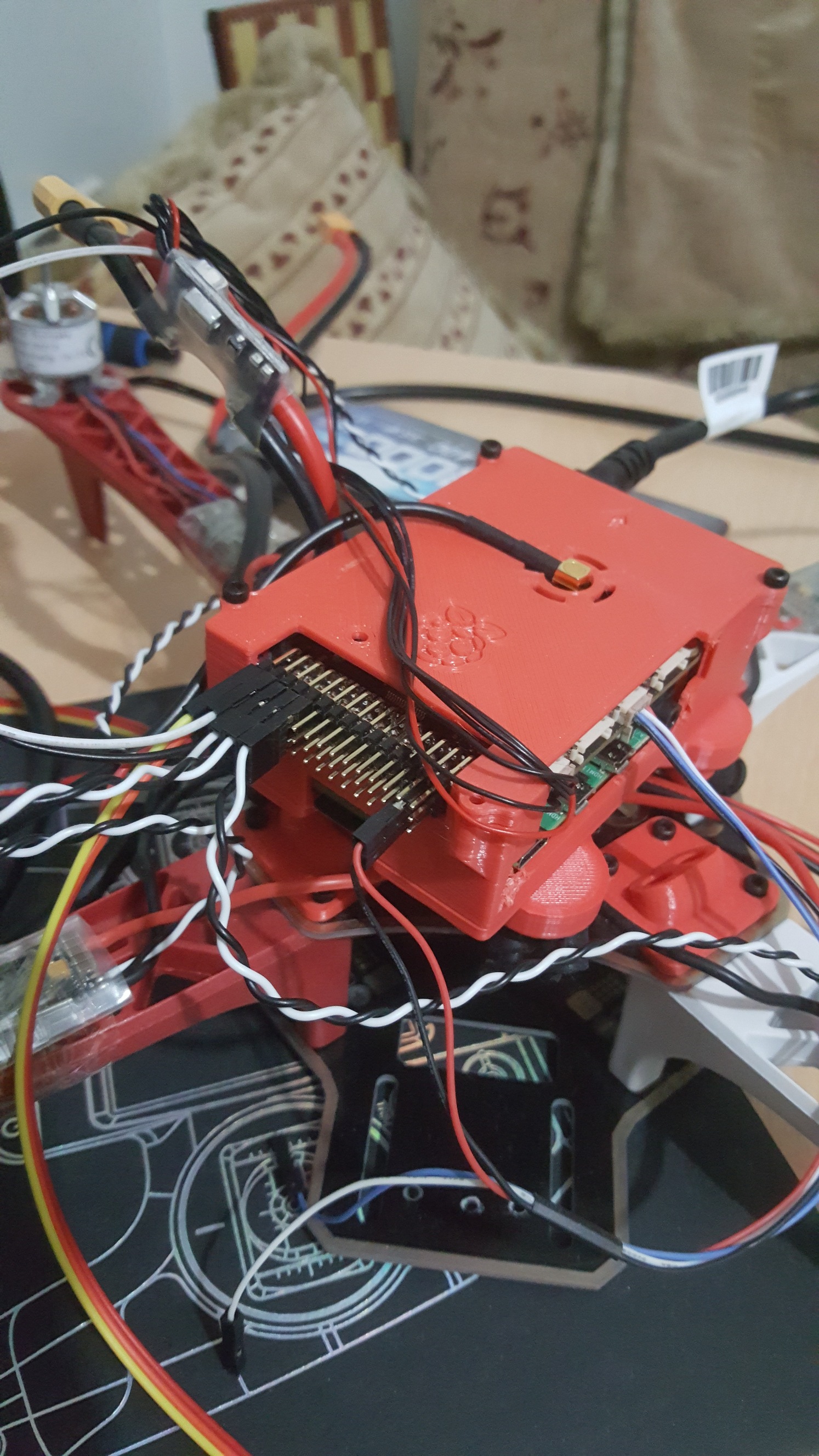
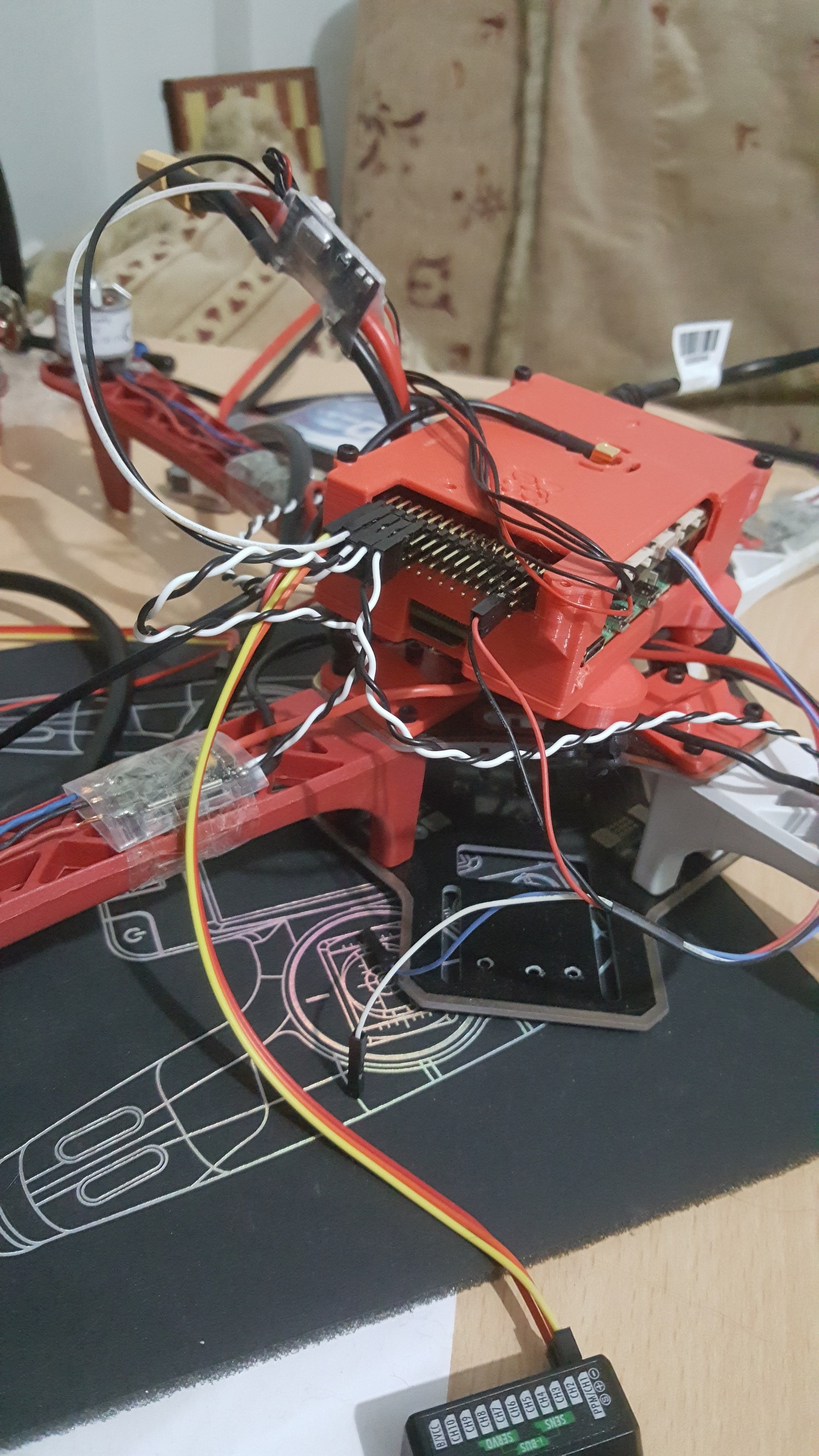
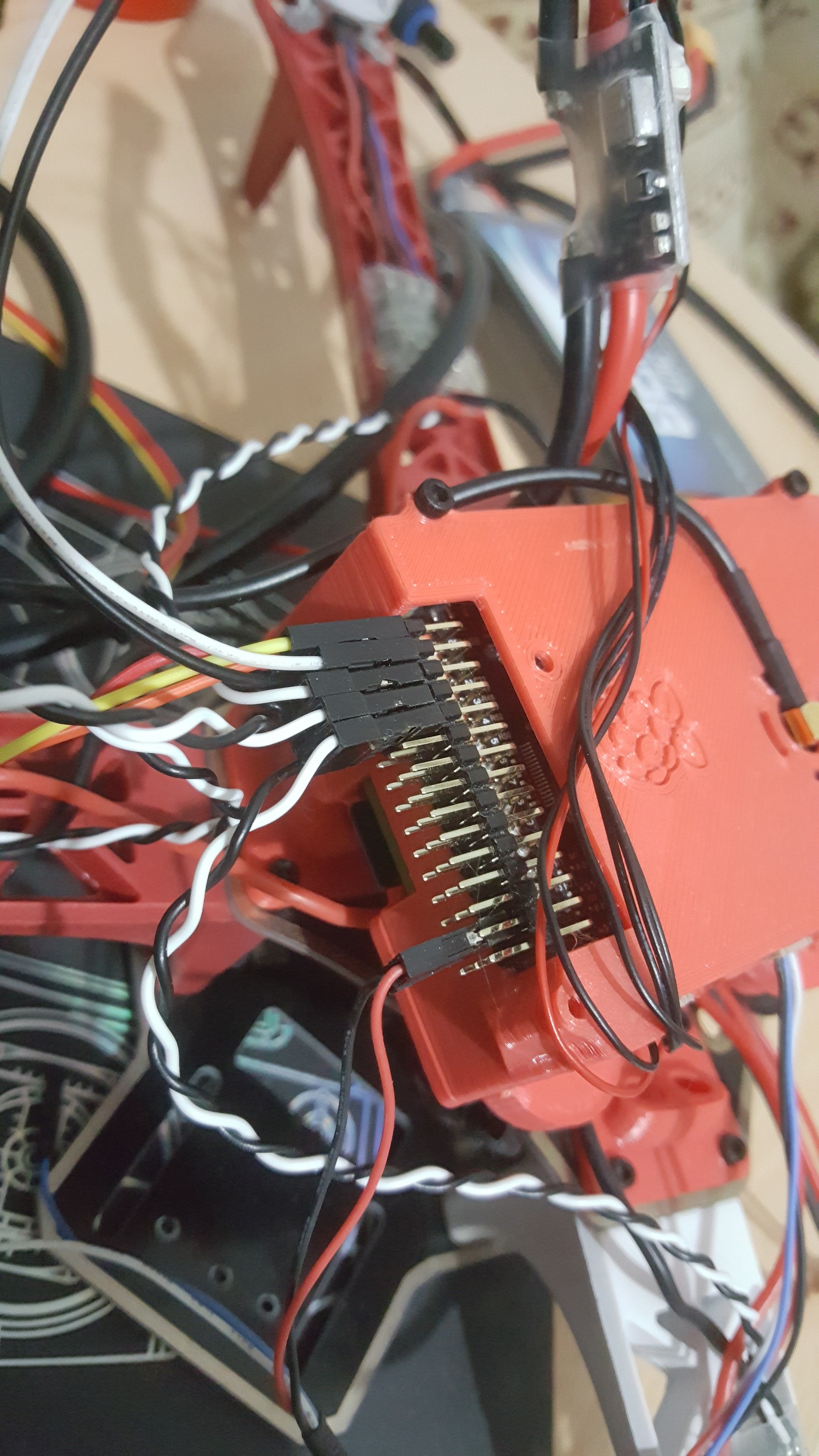
i use I2C port just for power to servo Railway.  i mean i took Vcc and Ground pin and i connect this pins to the railway
i mean i took Vcc and Ground pin and i connect this pins to the railway



FS-İA10B is my receiver and others are alternatives. other 2 is came from my Radio Flysky Nirvana. especially if i Success to bind fs-x8b i will use this one. right now i bind with fs-ia10b. but i will try for other receiver binding
finally i bind other receiver to the navio2. i mean right now, a receiver which came with radio is my receiver. and i have just one problem. if i controll the motor i thing everthing will be ok. which parameters do i need for this operation and without telemetry module via wi-fi how can i load and upgrade my system with the parameters. because i’m conneccting the mission planner or GCS but i cannot change or adjust the parameters. always i took message for fail.
when i try to test my motor from mission plannner. i got a fail message like, mission planner cannot reach the auto pilot.
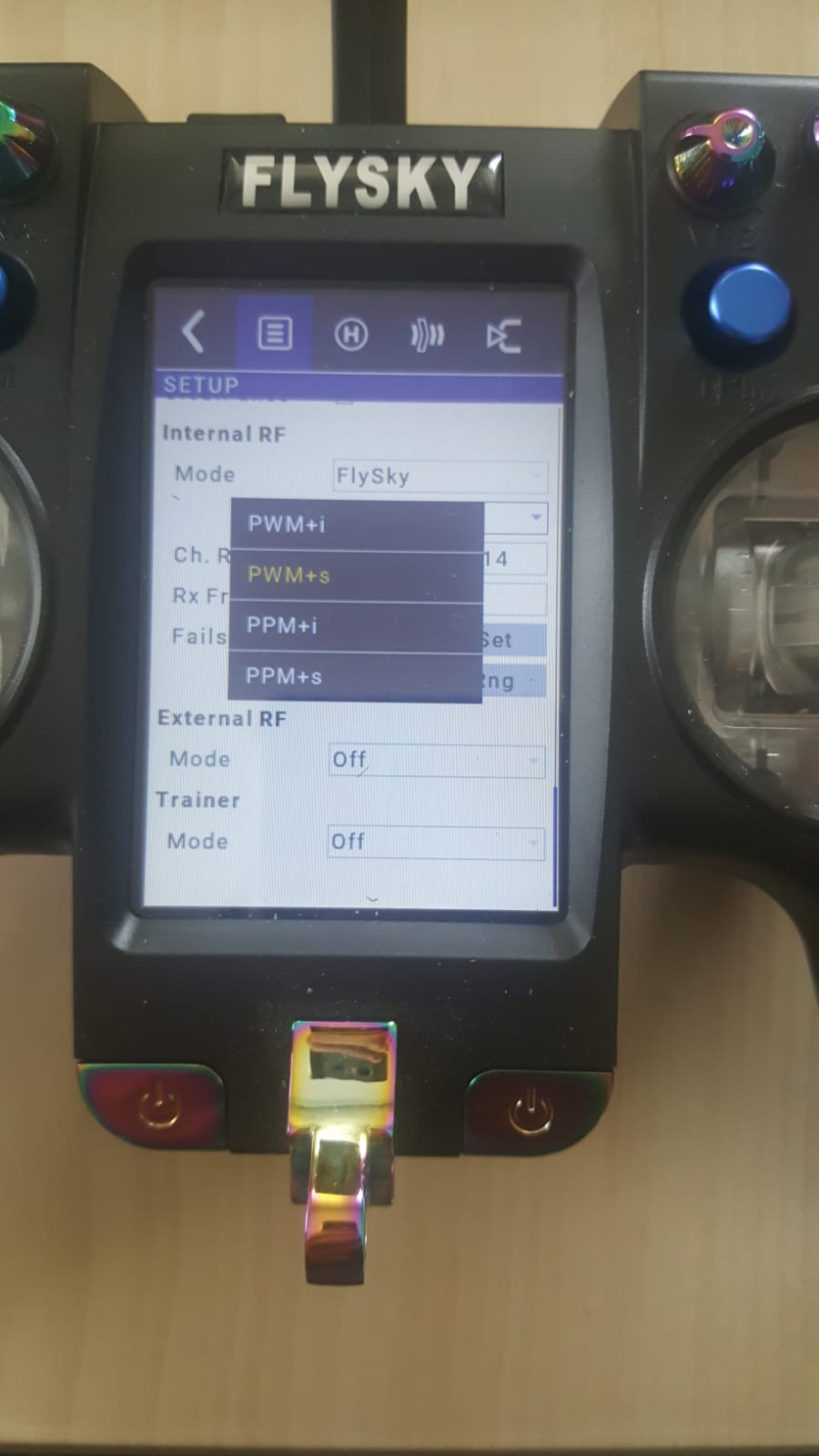
i solved the problem but also i need help. from this photo when i choose PWM and when i connect motors to my receivers (doesn’t matter which one but especially fs-ia10b) i can controll the motors. but navio2 doesn’t take signals. becaause when i make the test of RCInput i don’t have any signal. but from this menu if i choose ppm and when i make test RCInput, at this time i can see the signals and numbers at my screen. but on the other hand at the ssame way with ppm when i connect the motors to the receivers i cannot control the motors. also when i attach the servo railway i have never take any move. by this way i need to describe my pwmm signals to the navio2. and how can i do this.
summer if pwm enable from radio, i can control motor when they connect the receiver. but i cannot see the signals on the navio2
if ppm enable from radio i cannot control motors anyway. but i can take see the signals from navio.
And when you use ibus servo out, what is the result?
with ibus idon’t have any answer. at least i tried fs-x8b (receiver which came with radio) sbus pin and from radio pwm-i or ppm-i out. i can control motors from receiver one by one but no signal from navio. if i choose pwm-s or ppm-s i have signal from navio2 but i cannot control motors.
if i try FS-İA10B i-Bus ppm-i and ppm-s i got signals from navio2 but motors not run.
i’m still trying.
on the otherhand i got an interesting problem. when i connct the mission planner or GCS from LAN cable with UDP i can take the parameters but when i try to calibrate i cannot do this and when i try to test motors i got a message and it is writing that cannot reach the autopilot.
i solved all problems. thanx for everything. my main problem was calibbrating the ESC. finally i did it. but still one of my motor doesn’t work. if i will solve the problem i will write it. without navio2, when i try, it is working. when autopilot run 3 motors are runing.
step by step i will solve and do this. right now 4 engines are ok. system is ok. anddd (another but),
but i got problem to connect the mission planner or QCS. i mean that i can connect but when i try to calibratte my system. i cannot do this. for each time i took a message which writes ‘fail’ annd i’m trying to connect via wifi. for the next days i will try with telemetry. after that i will write again.
And now my question. but just question. İ would like to attach my fpv camera to navio2. from the servo rails. for example 5. 6. or another one. ca i do this. can i attach my fpv camera to the navio2?
thank you so much.
Hi Mesut,
Thanks for keeping me updated and sharing the solutions!
Could you please clarify what exactly you try to calibrate?
ArduPilot supports such cameras. However, I assume you might need additional hardware to set up an FVP system on your drone. Please check this page from ArduPilot docs. It describes a typical setup scheme.
i tried the 3dr telemetr sistem and i could calibrate.
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.