



UPDATE: I guess compass data is not displayed in the Compass setup page of MP. However, looking at my heading in Flight Data, I can see my rover rotating with pretty good repeatability (with GPS unplugged so I know the orientation is not from GPS). However, it has a constant 90deg offset and I can’t do a successfull calibration.
My main questions are:
For default Navio2 internal magnetometers, what are the recommended compass settings?
- COMPASS_USE/2/3
- COMPASS_ORIENT/2/3
- COMPASS_OFS/2/3_X/Y/Z
- COMPASS_CAL_FIT
- COMPASS_OFFS_MAX
I can’t find any documentation on default compass setup for Navio2.
ORIGINAL POST:
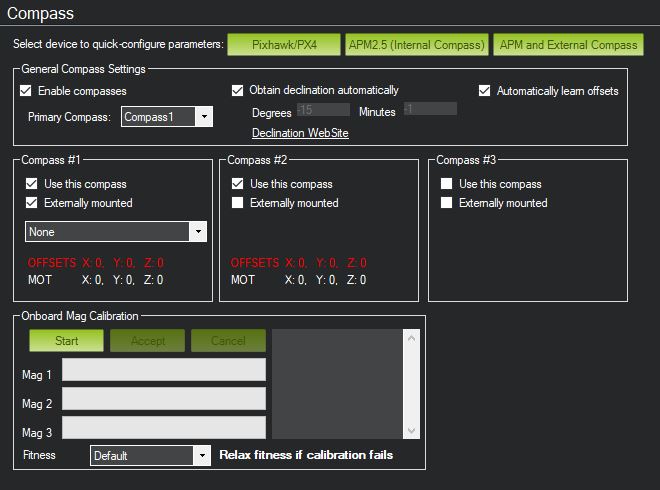
Connecting to Mission Planner, I don’t see either compass data available (see screenshot below.) This is causing “Bad AHRS” and preventing Auto Mode.
(Connecting through UDP and I’ve enabled compasses and . No other devices connected except for the power board.)
When I run $i2cdetect -y 1 I only see one device on 0x77. Everything else is --.
However, the Python and C++ example for the IMU show mag data coming from both mpu and lsm, all checks pass running emlidtool test including lsm9ds1 and mpu9250, I see devices spidev0.0 through spidev0.3 in /dev/, and dmesg doesn’t contain any errors/warnings related to I2C or SPI, so In those regards I conclude that both devices are working and can communicate.
Also, the GPS is working just fine, as do SiK Radios when I plug them in.
In /etc/modules I have spi-bcm2835, i2c-bcm-2835, spi-dev and i2c-dev.
Other info:
Navio2 on Raspi3 running Ardurover 3.4 kernel 4.14.34-emlid-v7 RCIO FW 0xb09979ae
Outside I can get good GPS-based orientation, but it has a constant offset that I can’t get rid of, similar to: NAVIO2 - Inconsistent Compass Problems - #2 by mr337 and Compass orientation + AHRS Orientation
In the meantime I modified the Compass/AHRS thresholds as large as possible hoping to allow Flight mode change anyway - no luck.
I feel like I’m missing some very simple configuration somewhere. Ideas?