Now that I got the motor issue solved, I was putting everything together, about to screw in the top portion of the frame and now I get this:
PANIC: AP_Baro::read unsuccessful for more than 500ms in AP_Baro::calibrate [2]
I saw another person have this problem but the solution was to install the correct image of linux, which I am using (downloaded from emlid’s site).
I saw in that forum that they asked for the results of i2cdetect -y 1
Here it is
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: – -- – -- – -- – -- – -- – -- –
10: – -- – -- – -- – -- – -- – -- – -- – --
20: – -- – -- – -- – -- – -- – -- – -- – --
30: – -- – -- – -- – -- – -- – -- – -- – --
40: – -- – -- – -- – -- – -- – -- – -- – --
50: – -- – -- – -- – -- – -- – -- – -- – --
60: – -- – -- – -- – -- – -- – -- – -- – --
70: – -- – -- – -- – --
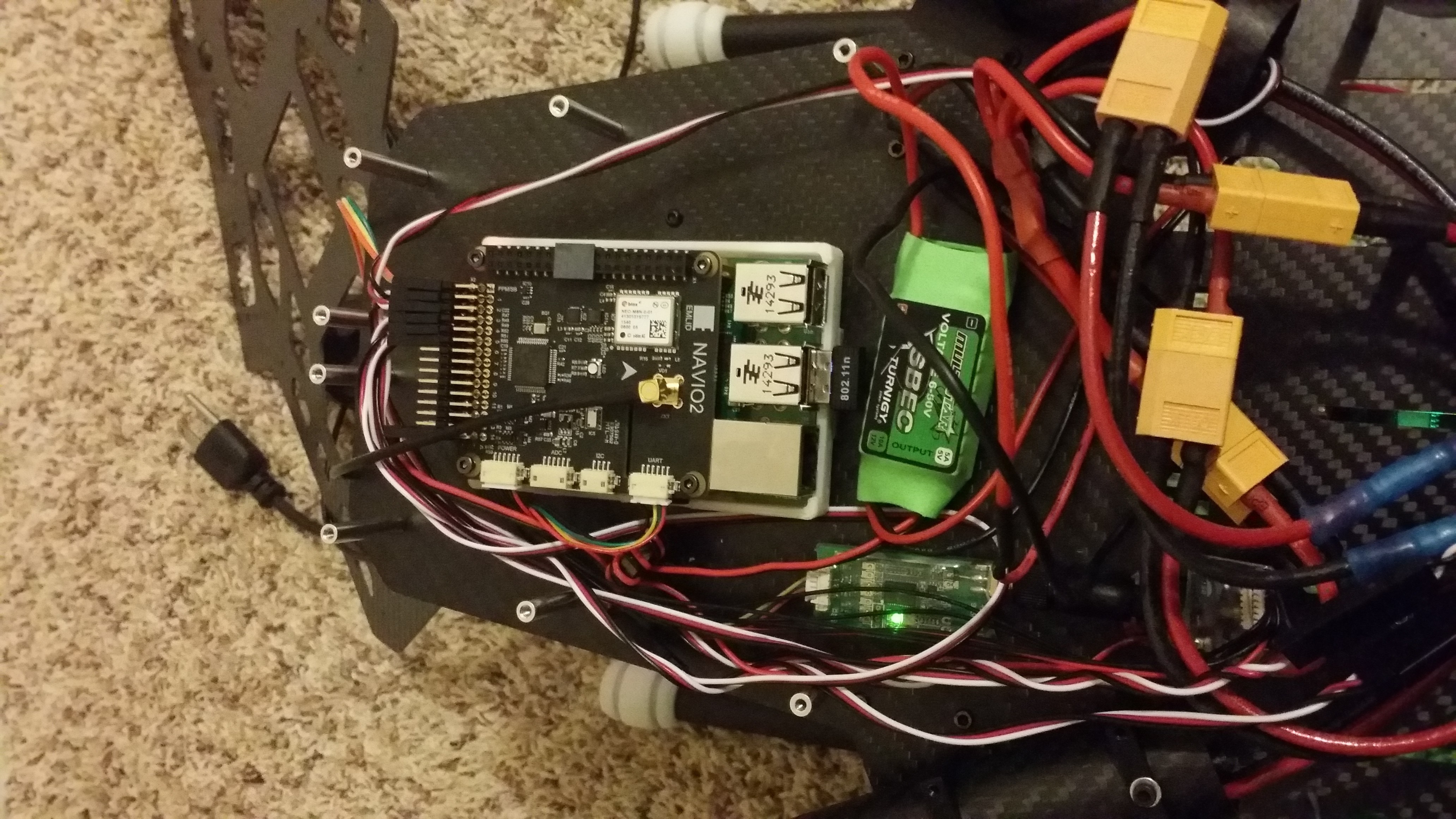
Here is a picture of my setup:
I thought it might be something with my UART thing because that is the only change I made from when I fixed my other issue to all the sudden it not working again, but unplugging it didn’t fix it.
I also though maybe the gps anntenna was messing with it, but moved it and still have the same problem.
Not sure what to look at next.
It looks like you did not fix the screws holding the Navio2 all the way. The new connector might have connection problems, if not held firmly in place.
Another thing I can think of, is there any piece of metal touching the RPi from the underside?
Do you have another RPi to test with?
1 Like
I borrowed another Pi to test with but when I got home I just checked and tightened the screws. There was some play on the connector side and when I turned it on again, it worked.
So that must have fixed it, thanks!
I replaced the screws that I was using with ones I found that were shorter (the two screws I was using for each connector were slight too long, making them touch each other within the riser).