Hi, I have a rover I’m trying to get spinning and running and coming into issues related to being
clueless when it comes to hardware,
TLDR; The rover is only going forward, with both engines spinning in the same direction.
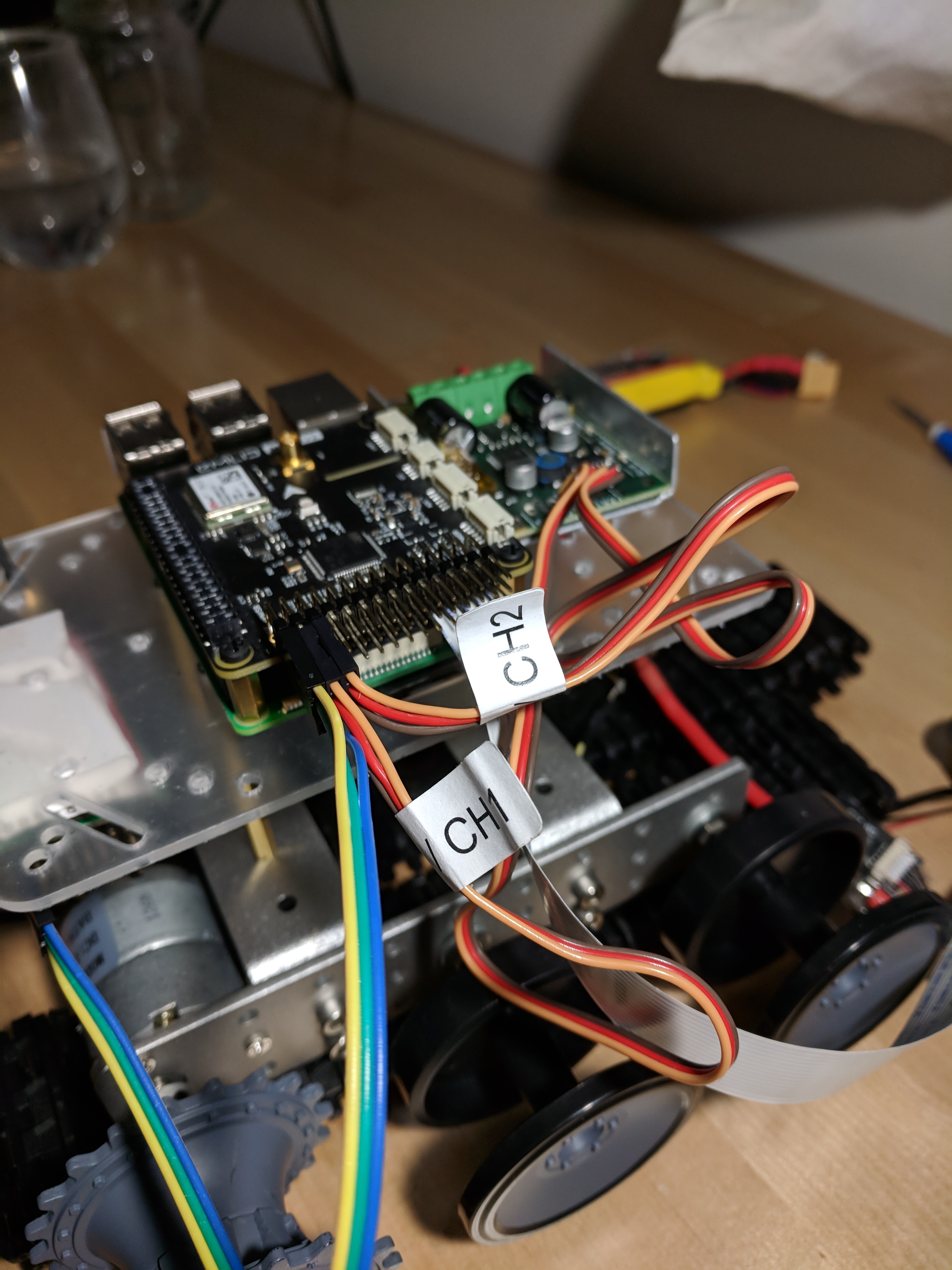
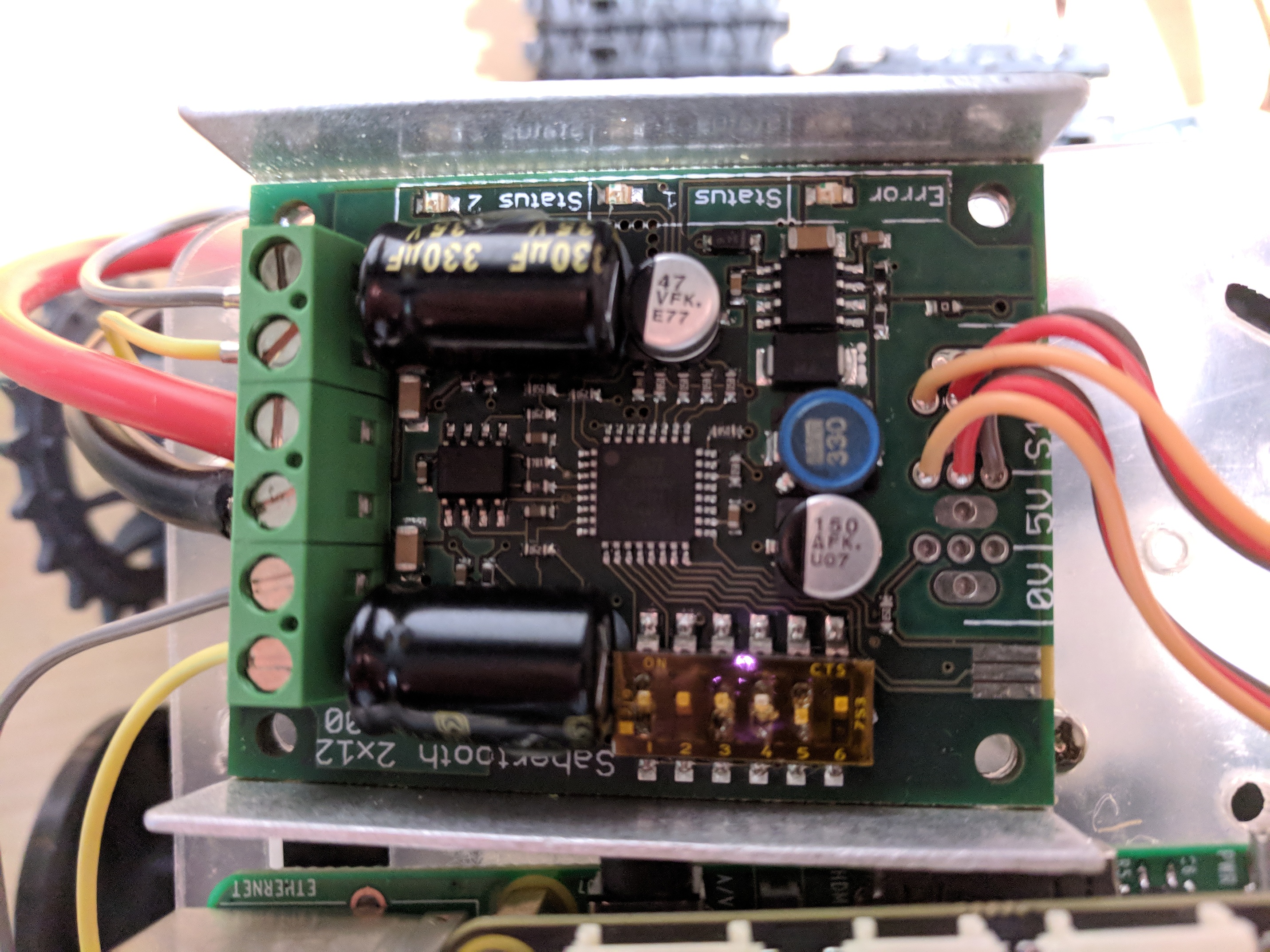
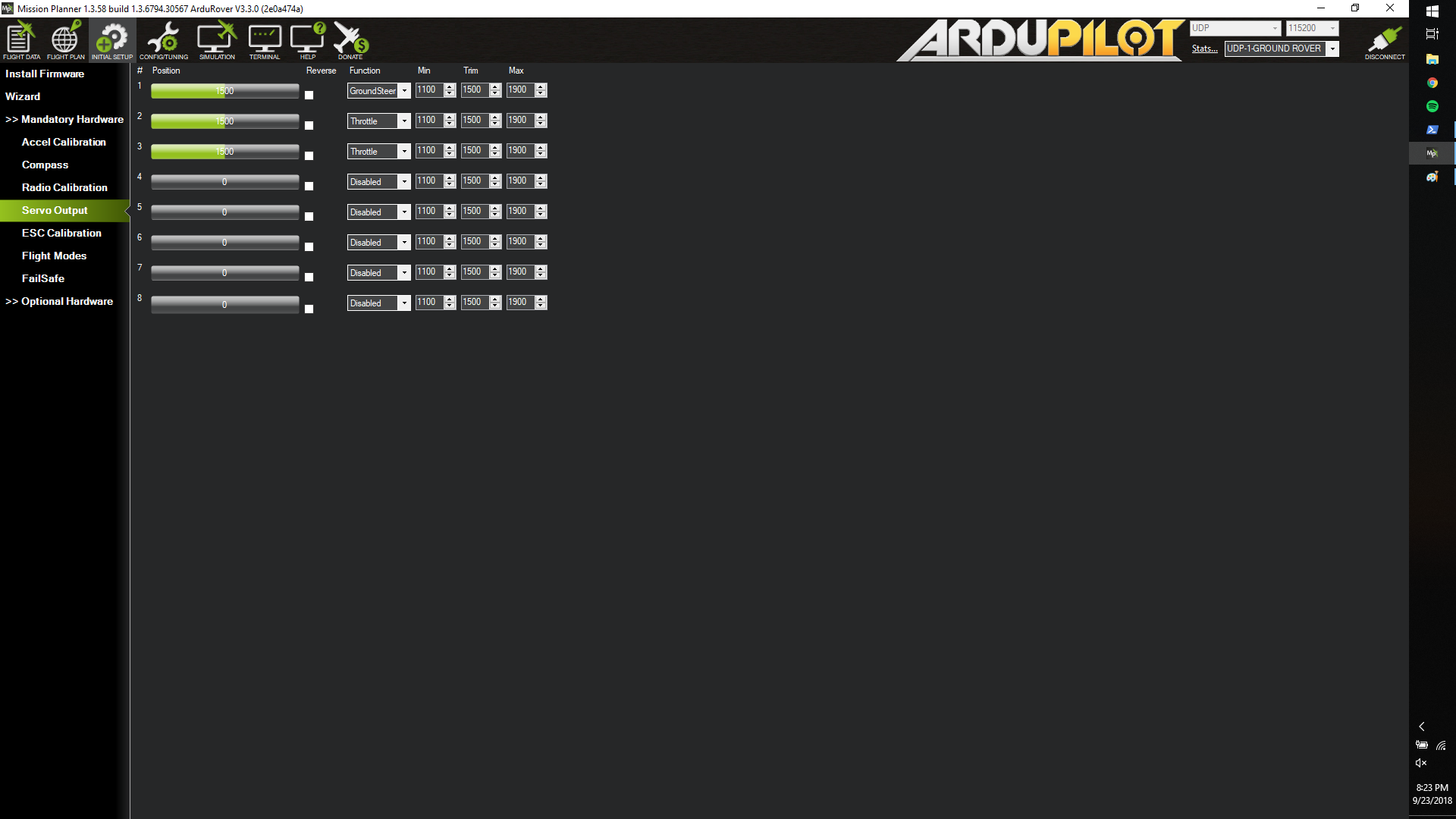
I’m unable to get this “steer” mode I keep reading about working. The servo’s are plugged into the Navio2+ controller, channels 1 and 2. (Screenshot1) and I’m using a Sabertooth2x12 (ESC) to control two brushed motors with all dipswitches set to up (Screenshot2)
I’m able to connect and get everything else looking good w/ MissionPlanner.
It seems only the left and right (forward and backward) are doing anything, almost like only one channel is working? Screenshots attached.
You need to set Servo_out to ThrottleLeft and ThrottleRight. Throttle and Groundsteering are for rovers with a steering servo. To keep things simple, adjust your motor connections, so that both tracks run forward with a high PWM (over 1500us) signal and and backward
below 1500us. This is not a requirement, but it helps during troubleshooting. The Sabertooth should be set to independent mode, no mixing and microcontroller PWM mode, so it does not adjust the PWM range on the fly. Sorry, I did not look up which settings the dip switches represent right now.
The last parameter affecting skid steering is the PILOT_STEER_TYPE. Here you can select your input type and/or the reversing behaviour of your rover.