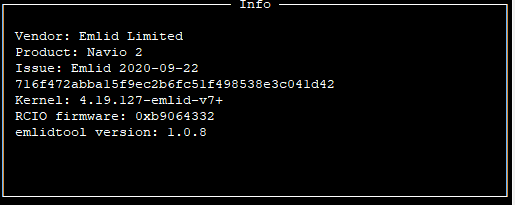
hi, i’ve navio2 and RPI3+. i’am assembling a quadricopter.
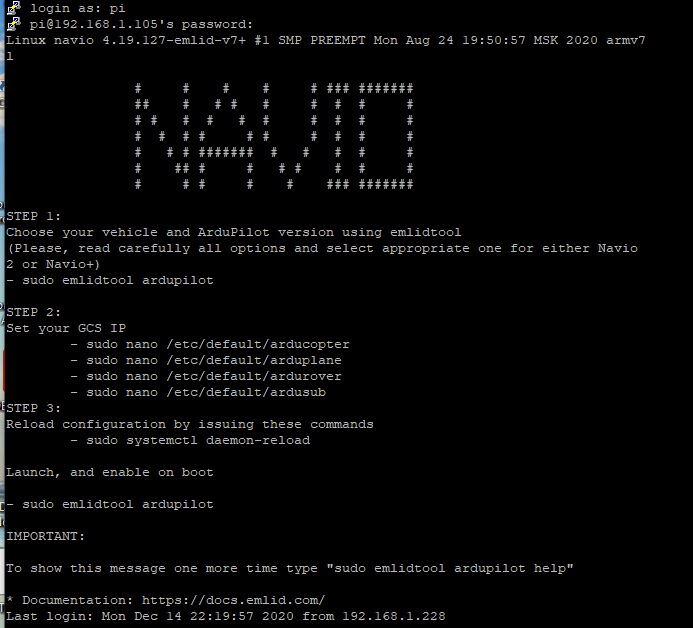
i can open raspberry on putty, with direct cable connection or with wi-fi
i reflash my sd-card with the last version of raspbian on the navio2 doc online.
with putty on windows10 i see that arducopter version is 4.0 and is star on boot
I set the correct ip address of navio2 in the /etc/default/arducopter file
but the mission planner doesn’t connet with udp.
before i try to connect with wireless and modify the wpa_supplicant.conf with the correct
ssid and pwd of my network i have connect mission planner with navio2 and i see that
all thing that are present at the moment (only navio2 and raspy, not have already connected esc, battery ecc…) work correctly.
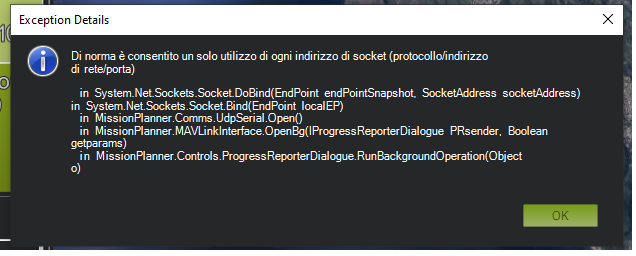
now i receive message from mission planner that the socket normally can open in only one direction
i don’t know why?
when i can connect again i post the screen shoot of the message
when using UDP you need to set IP address of your base station I.e. computer with MP on it.
However, when using TCP you need to set IP address of your drone. This is done in MP (top right hand side corner).
Also whichever you choose you’ll need to set correct values with the arducopter command: # sudo ArduCopter-quad.
Regular upgrading is done in MP with USB cable.
However, do not use that form of upgrade as arducopter is modified to suit Navio2. If you use the default arducopter version the control LED will not work.
A regular upgrade for Navio is done via the emlidtool. It will tell you when a new version is available. The current supported version for Navio is Arducopter 4.0.3
See also: https://docs.emlid.com/navio2/common/dev/changelogs/