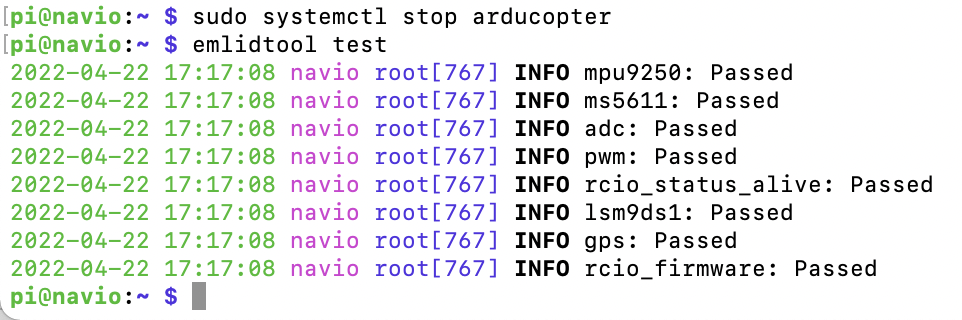
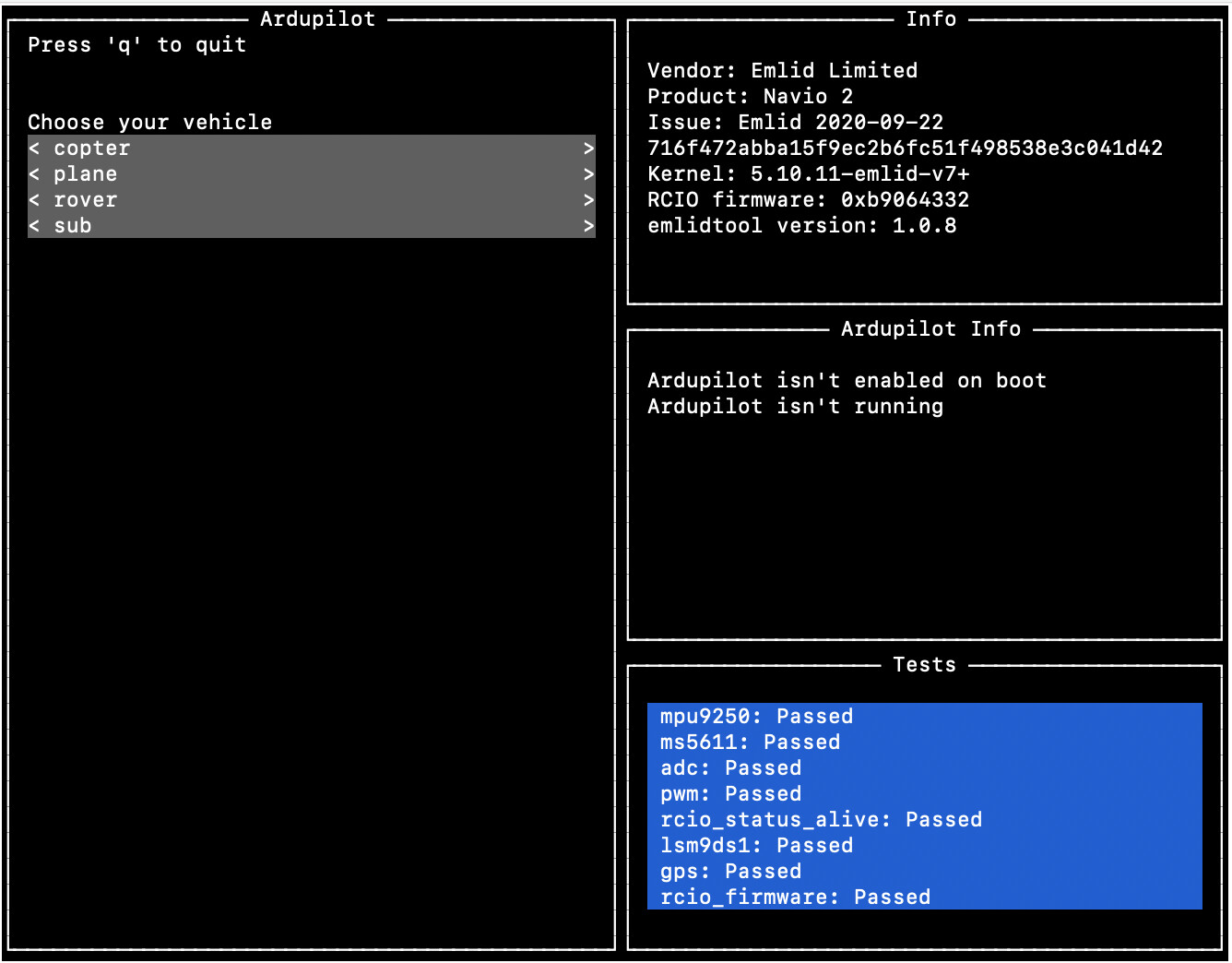
Can you please double-check that the antenna’s connector is tightly inserted in the Navio2 connector? If it sits tight, please run the emlidtool test. It will check if the Navio2 chips pass the tests.
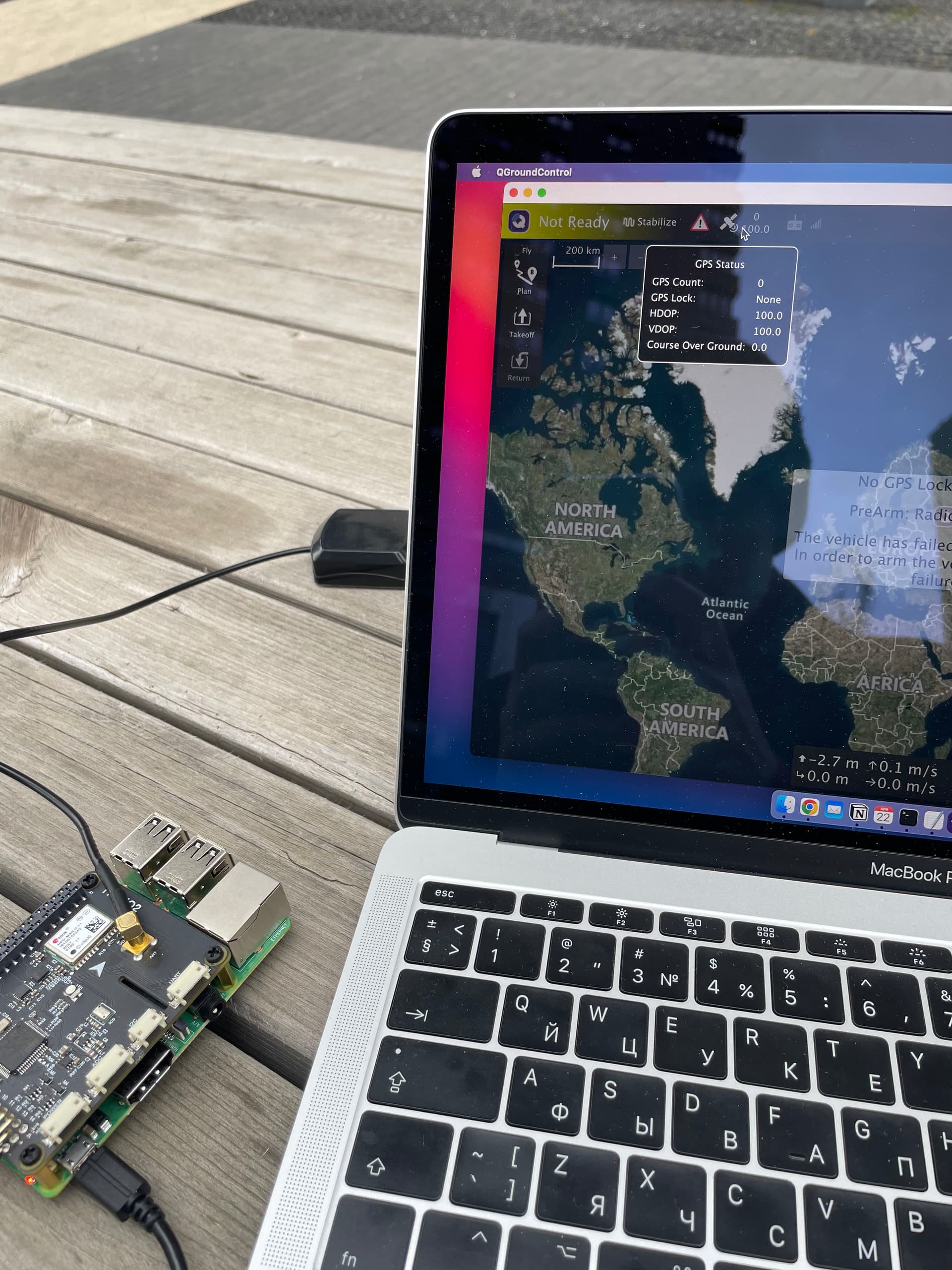
Thanks for the test! I see that everything is fine with the GNSS chip of Navio2, indeed. To check whether the antenna receives a signal, please run this example in Python or C++. If you see the readings, the antenna works fine, too. In such a case, something is wrong with the configuration of QGroundControl, but let’s check the antenna first.
Just to double-check: have you placed the antenna outside when running the example? The antenna needs to be provided with an open sky view to get the GNSS signal.
Do you have another antenna to test Navio2 with? If it works with a different antenna, the issue is with the original one.
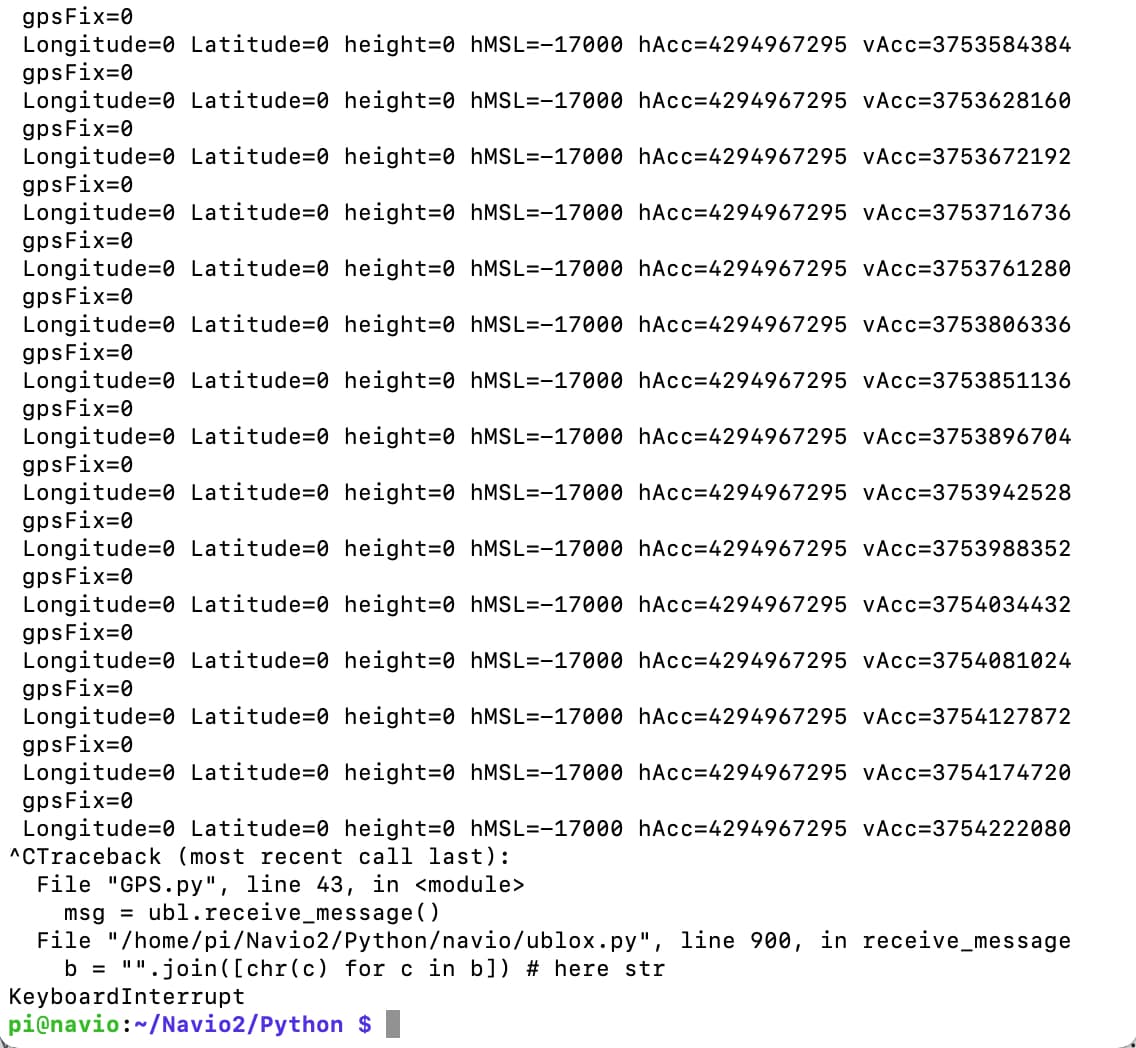
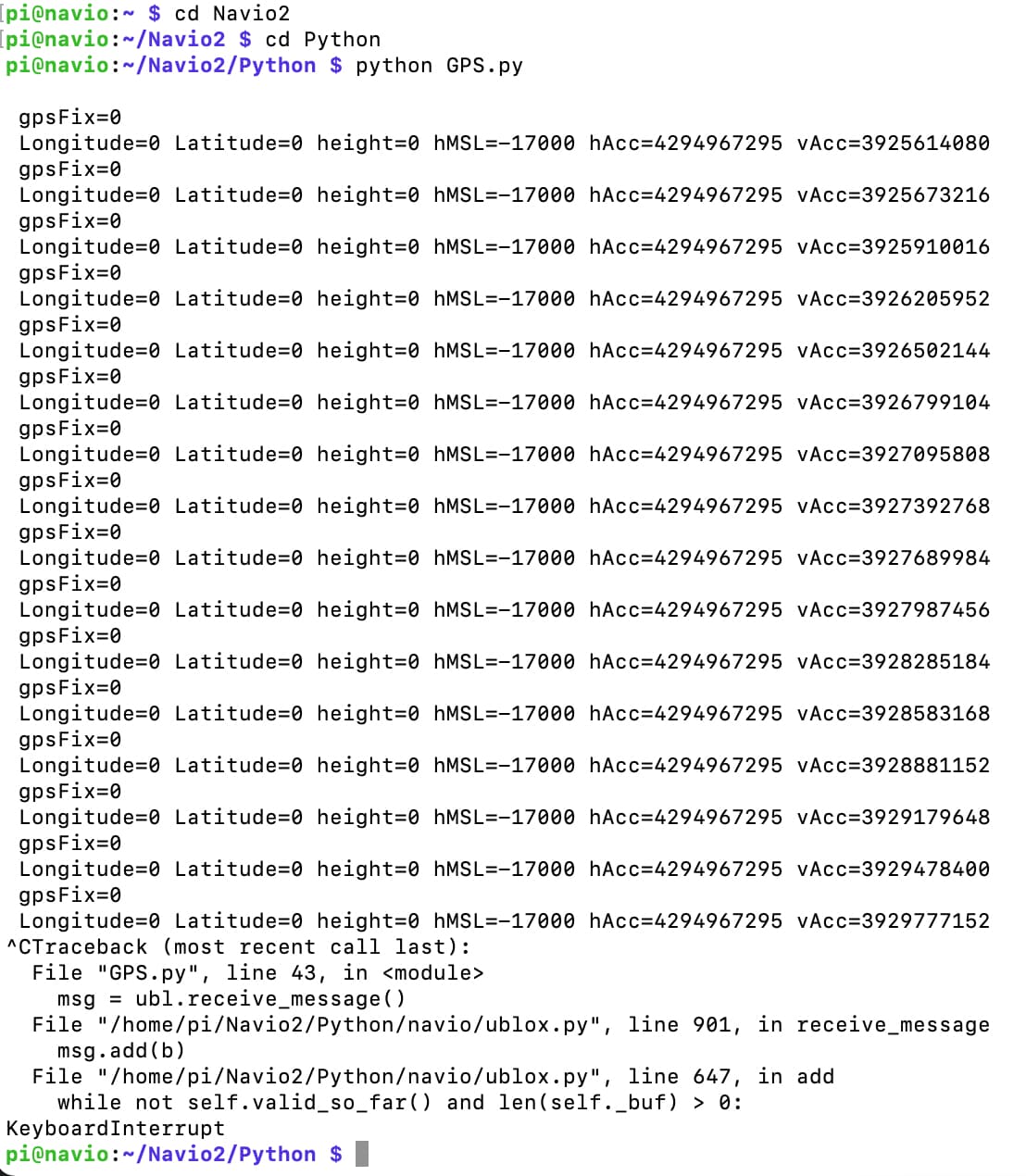
The local Emlid representative came to me and gave me another antenna. I ran the example that you advised me earlier. The example showed that the new antenna also does not see the position as the old one. I gave the new antenna back. Are there any other ways to identify the problem?
Here is the result of running the example with the new antenna
Thanks for the detailed reply! So, the issue is not with the Navio2 antenna—it’s good that we’ve figured this out. I’m currently checking with the devs on the further steps here. I’ll get back with the news soon.
Our dealers have checked your Navio2 with the antenna, and it appears to be working fine. It can receive the satellite’s signal. I suggest placing the Navio2 antenna on the ground metal plate. It reduces multipath, provides shielding, and improves signal reception. Please, also make sure to test it out on the open sky view without any obstructions from the buildings or cars.
Hello! Thank you for your work.
They said the problem could be with the Rpi 3 B+ I use. I don’t know yet. But I’m glad that the module worked for someone. I will test it again on this weekend on another terrain.
Thank you for all the work!
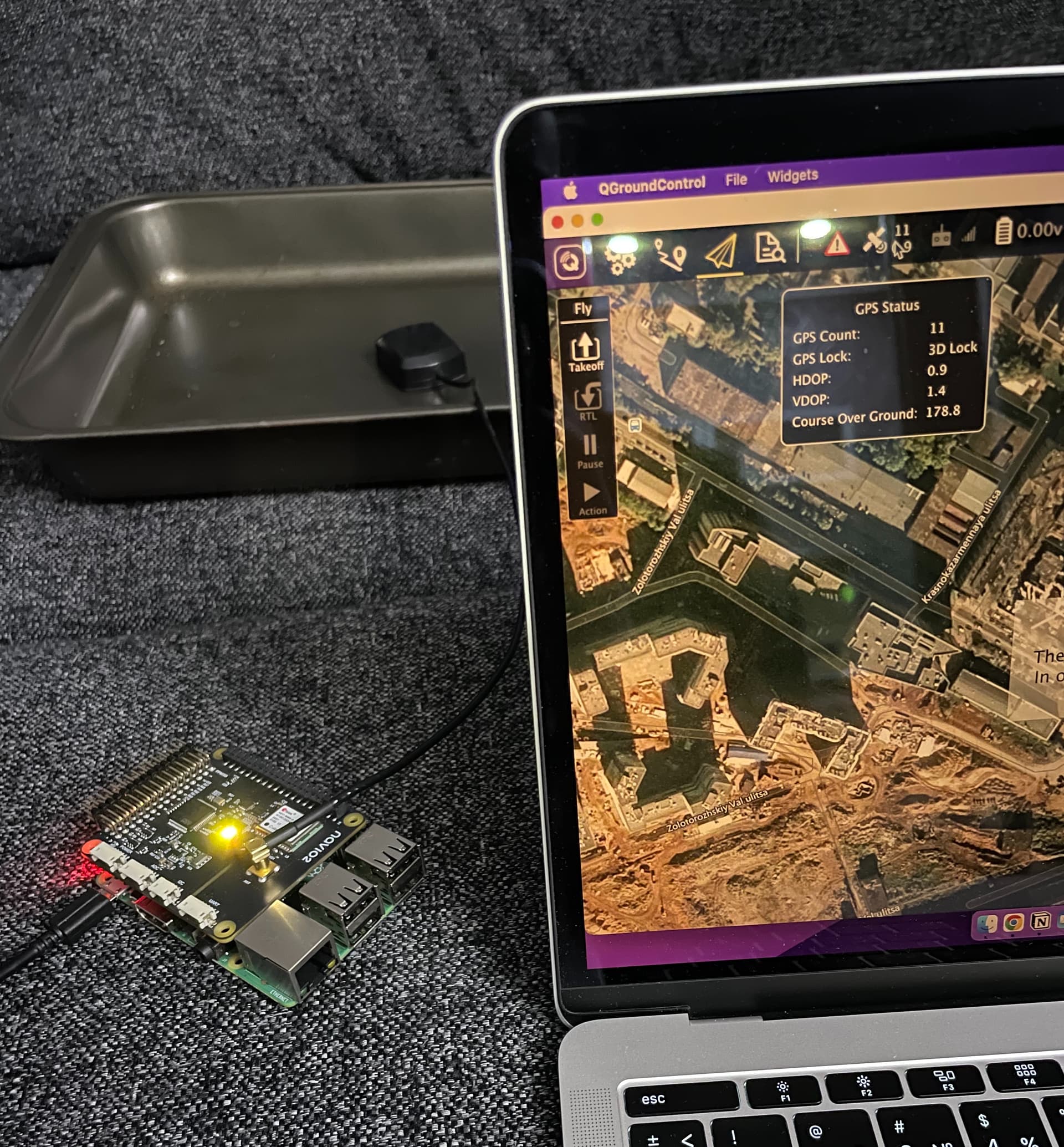
GPS antenna is now working. Your advise with the metal plate helped me.
It’s funny how it turned out that the antenna is very sensitive to the metal plate. I put the antenna on the oven tray. I was inside the building and the antenna caught up 12 satellites in 10 seconds. But without the oven tray it doesn’t see any satellites.
So now I have a solution I will add a metal plate to the drone. Thank you!
I hope my story will help someone else.
I’m really glad to hear that now everything works as expected
Ground metal planes can really do the great job for improving the signal reception. Thanks for sharing your feedback! I also believe that it may be useful for other users.