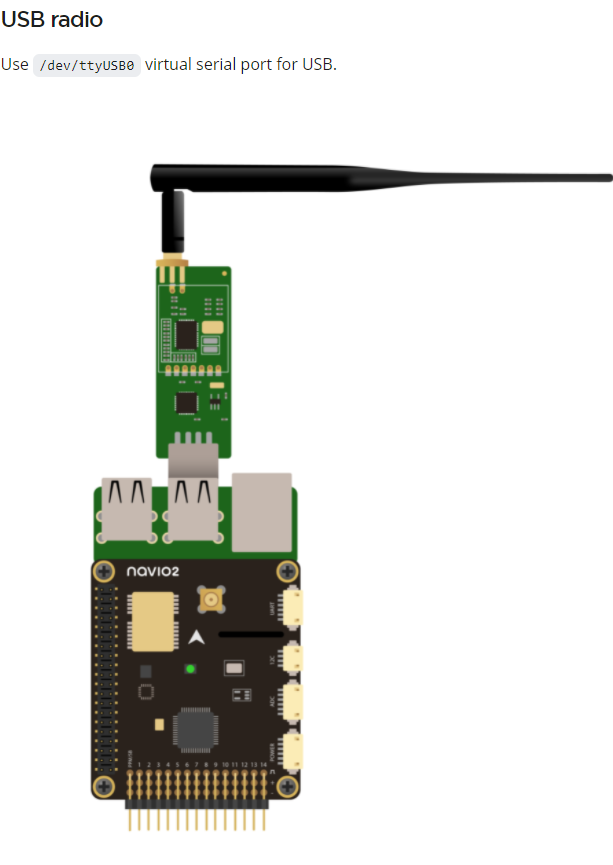
so the documentation for Navio2 suggests UART or USB radios (see image below) via links to jdrones store which no longer exists, as far as I can tell. bummer. I just want bluetooth for my navio project and can’t seem to find one on sparkfun and it seems like emlid had to do something to disable the built-in BT functionality of the rpi 3B motherboard but because I’m not in the board yet I can’t do any further diagnoses.
Apologies in advance for lacking some of the necessary information to get help, I’m just shopping:
-
Image and ArduPilot version.
not installed yet; pricing out hardware; wanting to cast mock location from navio 2 via BT; -
Detailed problem description. How does observed behavior differ from the expected one?
I’m reading threads that the rpi BT doesn’t work. I love being able to mock location into android from RS2 and would like to be able to do so via navio2. -
Your step by step actions.
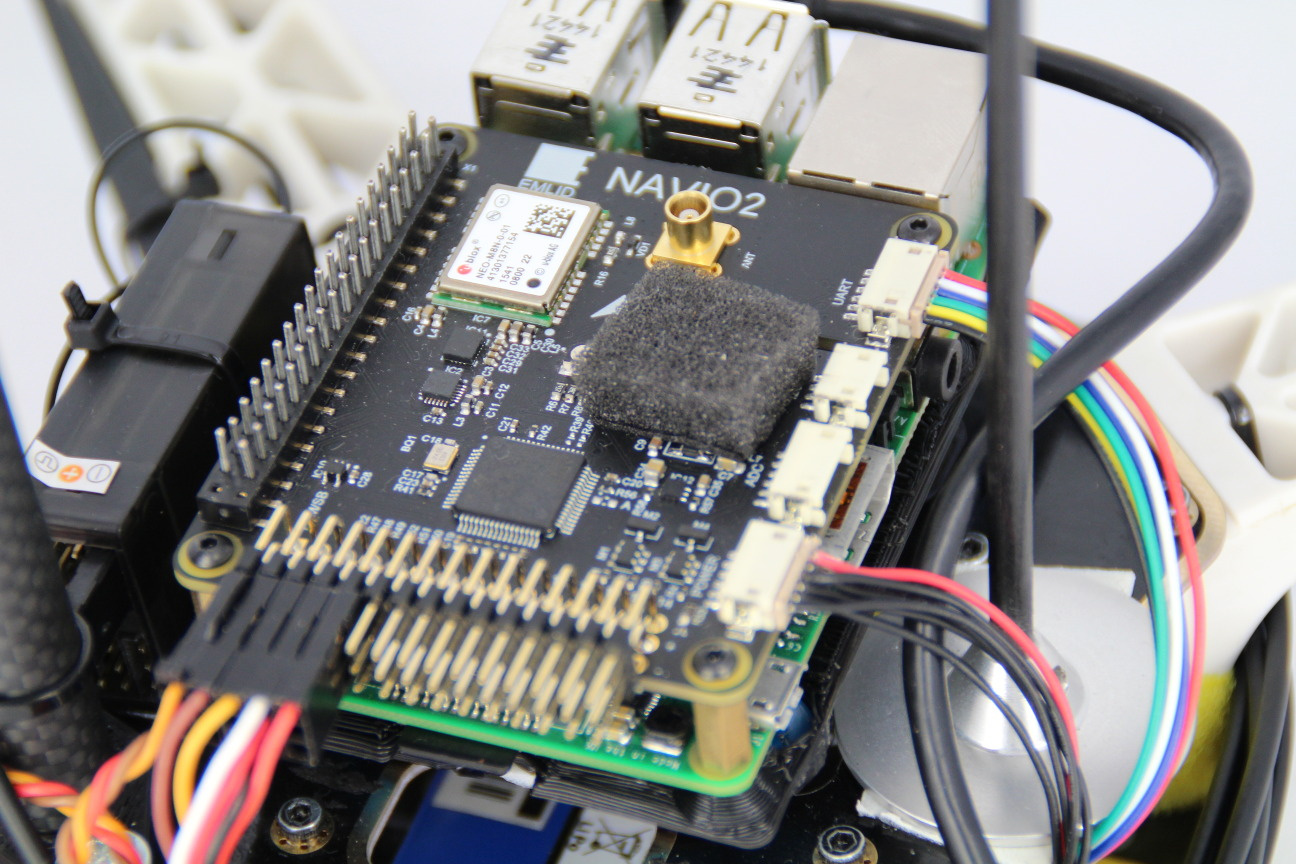
just readin’ the forums. thanks for all the great posts. I’ve also noticed in other documentation images that there is a device plugged into the UART port, with no mention of what specifically it is because the image references barometer UV protection: -
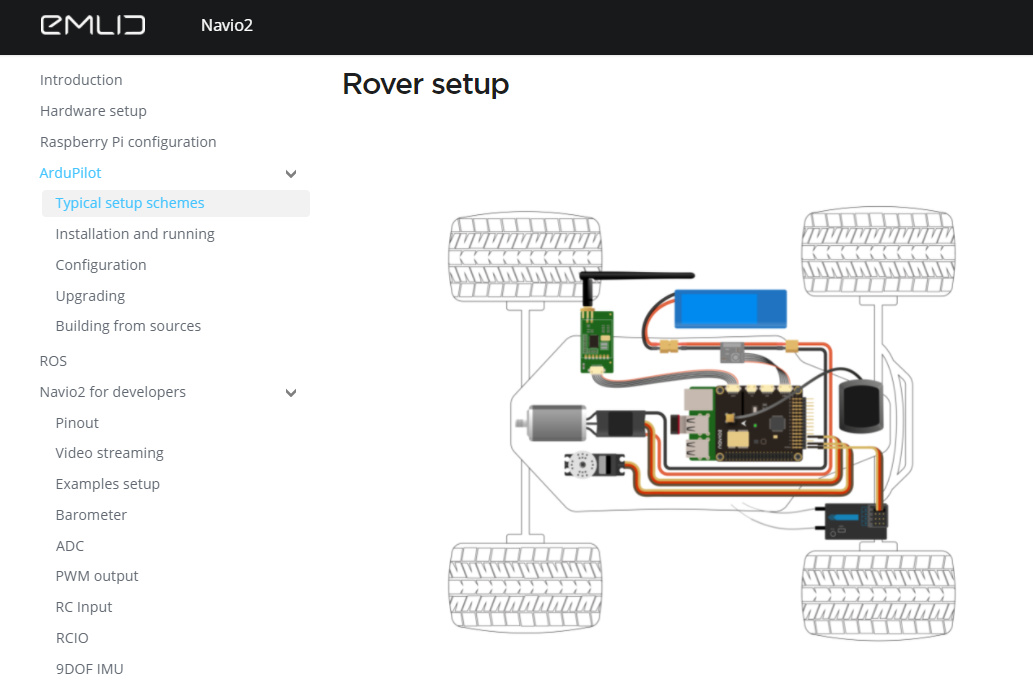
Picture of the setup and connection scheme.
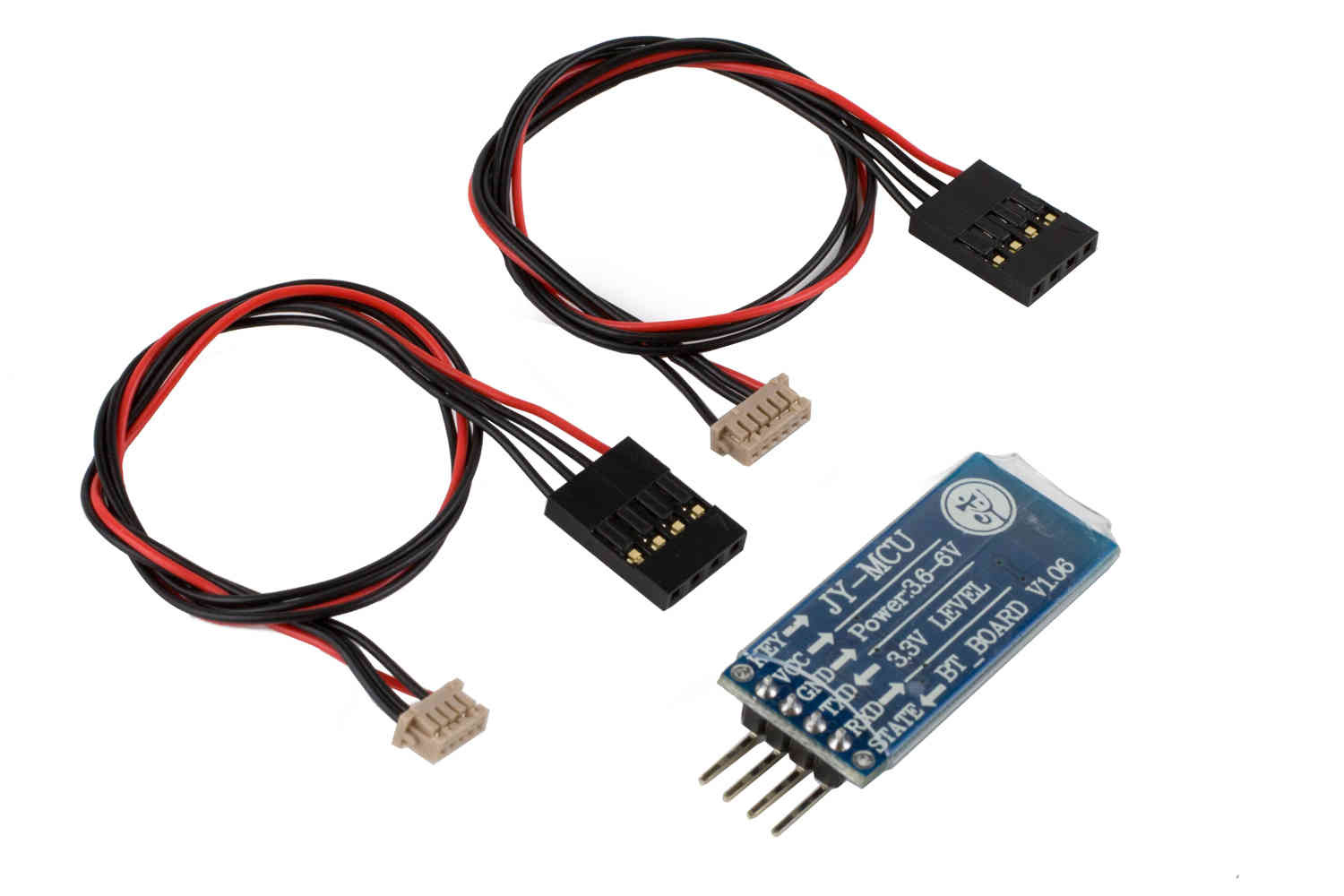
I just want one of these that kicks off BT location signal like the RS2 to be cast. But all the links in the documentation via emlid and via ardupilot are dead ends to jdrones store that doesn’t sell what I need anymore. pic related.
Furthermore, it appears that using a simple dongle is no amateur feat. -
If using any additional hardware please provide exact make and model.
Any and all community hardware recommendations welcomed. Or if I’m missing a big obvious software solution please correct me. Thanks for your time and attention.