Yup just as I thought. 27 days later and still no reply,
Nah I am done with this unprofessional company.
Yup just as I thought. 27 days later and still no reply,
Nah I am done with this unprofessional company.
Hi Barry,
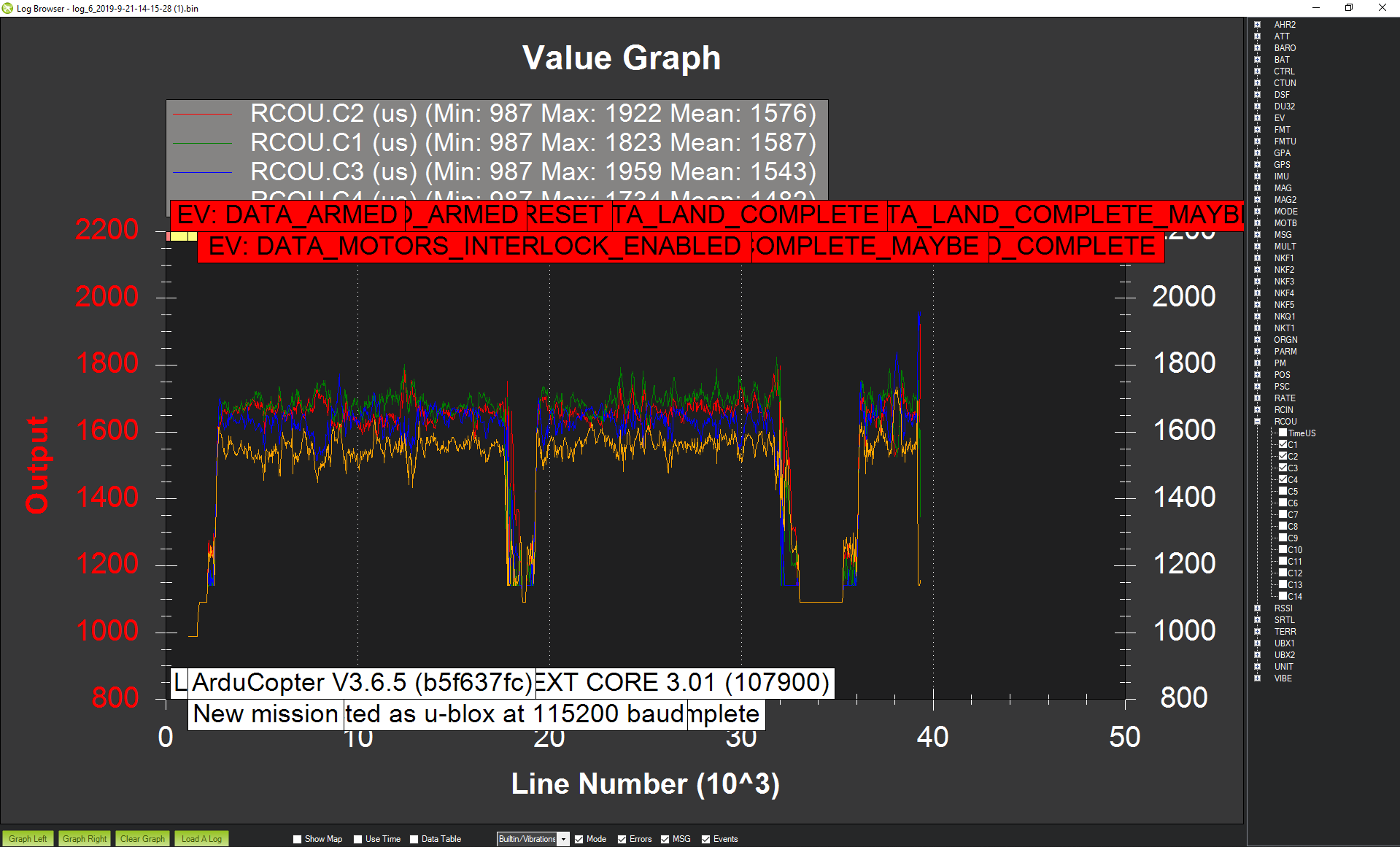
We’ve thoroughly analyzed your logs, please take a look at the following screenshot:
According to your log, there seems to be no software error: Ardupilot recorded commands from the RC transmitter stick, drone started to perform a maneuver.
Then logging abruptly interrupts. Drone turned off while it was in the air.
I’d recommend paying attention to the power supply: shaky wiring is likely the main cause. It looks like the drone sharply changed its position, and one of the wires disconnected from the board.
Also, I can note that your motors have an uneven load. Perhaps, your setup has shifted gravity center, or motors have different specifications. I’d recommend noting this for future flights.
It had redundant power.One via the servo rail and the other via the Navio2 power port. The motors were still spinning when it eventually hit the ground.
NO the motors are all the same. But never mind I am never trusting your products again.
True redundancy is very hard to achieve. Even if you have two power connections to the Rpi/Navio, those two connections still come from one power source, the battery. I had at least two crashes caused by a lipo connection failure. One time the battery disconnected in flight, because I did not plug the XT60 connector all the way in. The other time, the XT60 connector was not properly soldered to the lipo by the factory and it broke off in flight, causing intermittent connection (the shrink tube still held the connector to the cable).
The props still spinning might have been windmilling.
Nope not even close. Motors were at power when it hit the ground
What do you think about this Sebastian. I wonder if my issues were not as a result of this. A pity that Emlid could never pick up on this.
They are only mentioning STM32 powered flightcontrollers in the article. I do not know if the Raspberry Pi would be affected in the same way.
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.