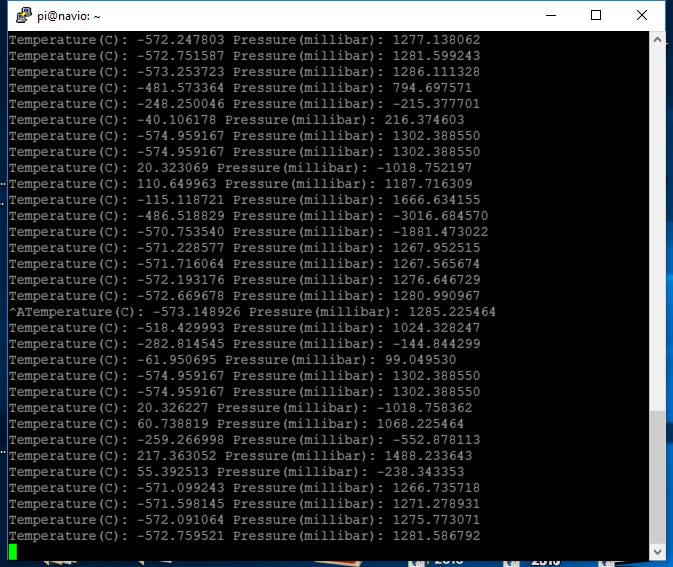
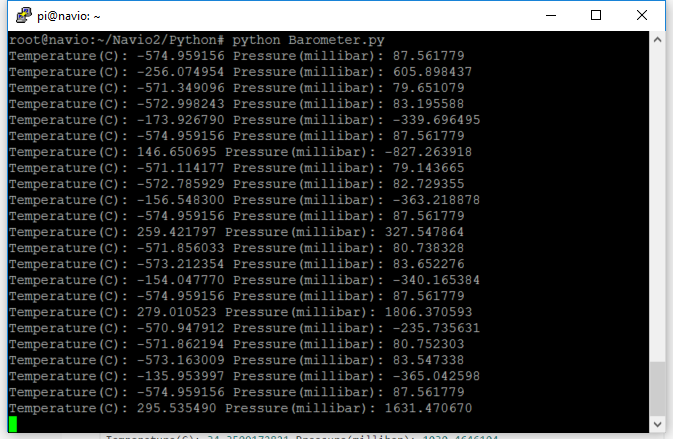
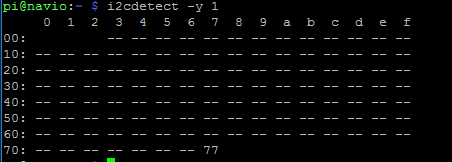
I’m having trouble with my navio 2 barometer. My results are as the pictures. I tried with different Rasperry but couldn’t fix the issue. I have rp3 under it. There is nothing else in my I2C port. As I read from forums first I need to suspect from connections but my screws are fit and all pins are in touch. I double checked with my multimeter.
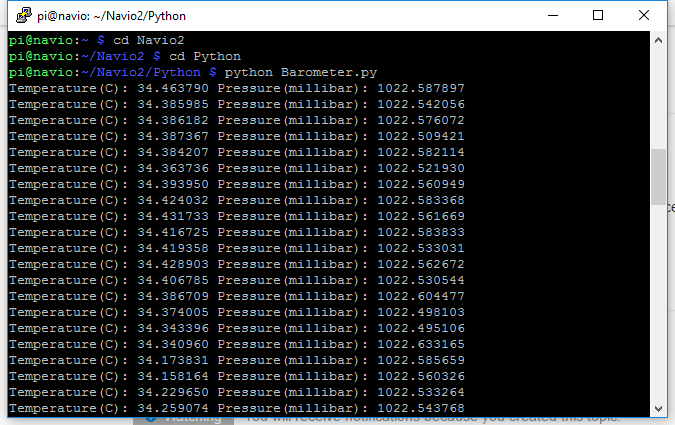
I reinstalled emlid image and install and update apm then try with and without ArduPilot now results are better. it changes ± 1 meter on hub display without foam. I’ll try with foam now.
Thanks for your quick support.
There is one more thing I need help. I checked docs but couldn’t find a clear info. I want to start apm with tcp telemetry and external gps. What should I add to rc.local file ? I’m tring to run with ;
sudo ArduCopter-quad -A -B udp:192.168.0.104:14550
but it shows me telemetry datas or something like that;
I have Tallysman multi-GNSS antenna for onboard gps and 3DR uBlox GPS with Compass Kit. I want to use uBloxes compas to avoid High Internal Compass Offsets and I want to use both GPS module. Could u help me to find best startup command ?
Thanks a lot.
it works with 2 gps now. But I still have some questions about compases.
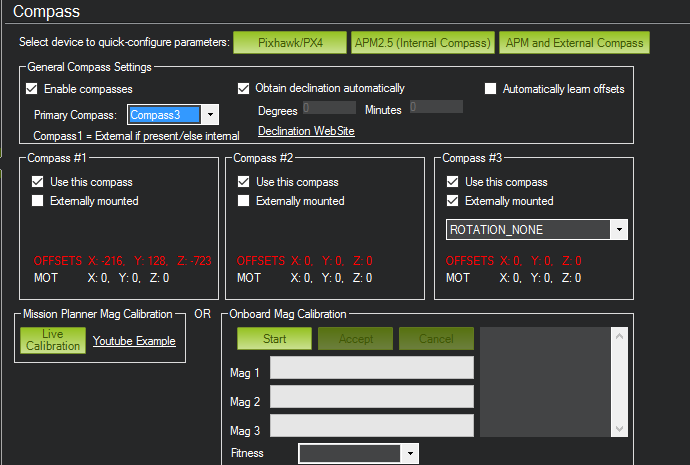
Which compas should I select as primary to use uBloxes compas ?
When I run live calibration and move only the external compas none of values changes. they changes only when I moves the board. Is it related with IMUs ?
Is there any way to accept UDP connections from any ip adreses? I cannot use static IP on my gcs so everytime I need to change this code for new IP adreses.
I have been fighting Compasses, both internal and external for the last 2 weeks. As usual it was user error, this is what i did to solve (Benedikt actually is the one that solved my problems, i am just trying to give back some of the help i got here):
1 - make sure you run Onboard Mag Calibration on open field and away from metal objects of any kind (don’t bother with live calibration in MP because it is broken)
2 - EVERY TIME you make a change to the compasses, such as wich one is primary or wich one to use, make sure you resart the system, otherwise changes will not be taken in consideration.
3 - If you are using a 3DR external compass make sure you add ROTATION ROLL 180 because the magnetometer is under the pcb (rolled 180°)