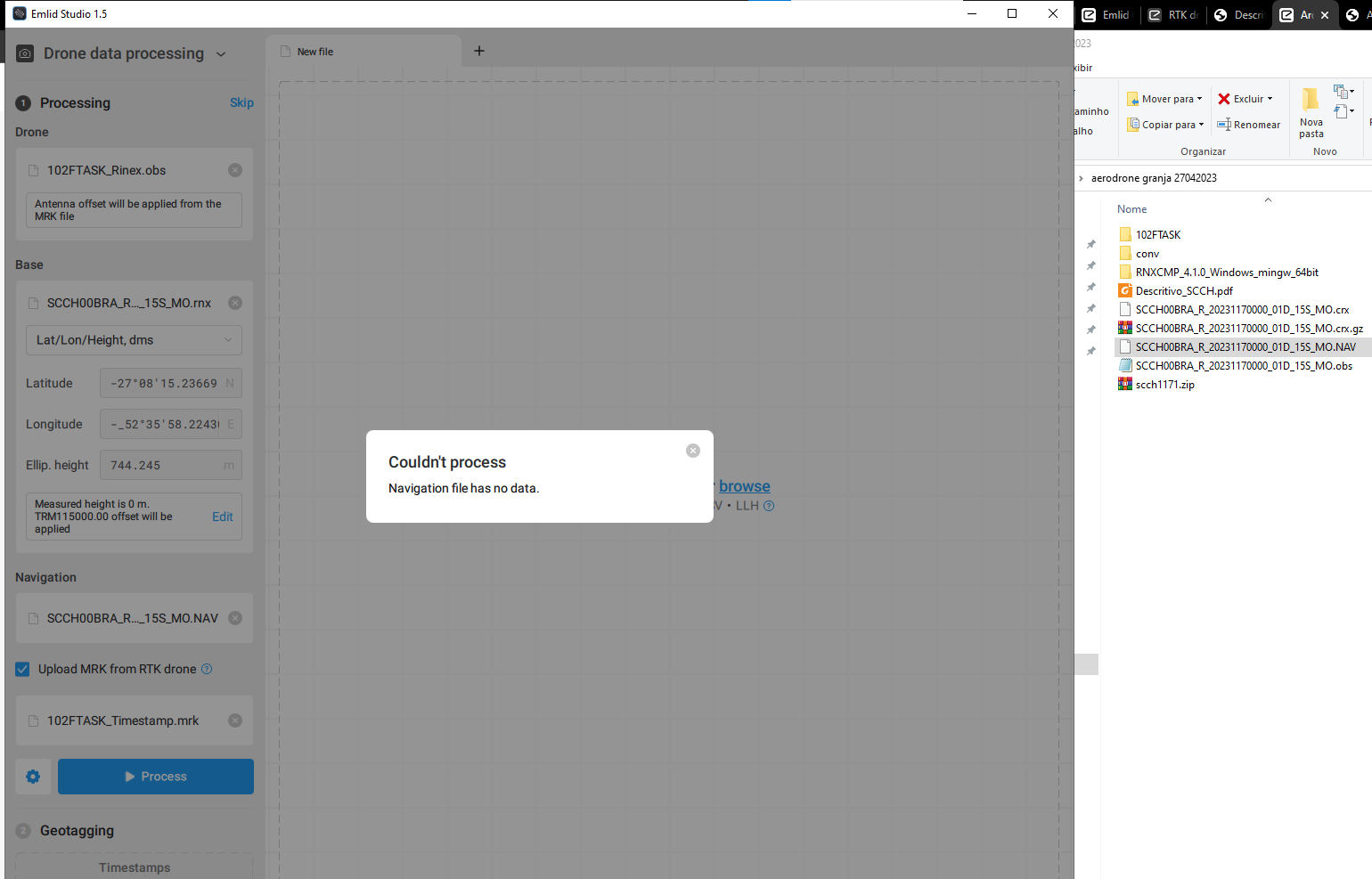
This is the base observation, and should be placed in the Base field instead.
Usually there is a proper navigation file from the drone available ? Usually called *.23N or containing. the letters “MN” (Mixed Navigation) as opposed “MO” (Mixed Observation).
Got it, so it seems like no immediate nav file. Have you tried converting the .bin file? On a Mavic 3E is simply an RTCM file, so rename it to .RTCM3, and Emlid Studio should process it. Maybe that will produce a navigation file?
Otherwise, you can likely get one from your CORS station.
If you look at the file you have in the navigation input field, it says “MO” in it. So it is a observation file, not a navigation file. You need to source a navigation-file.
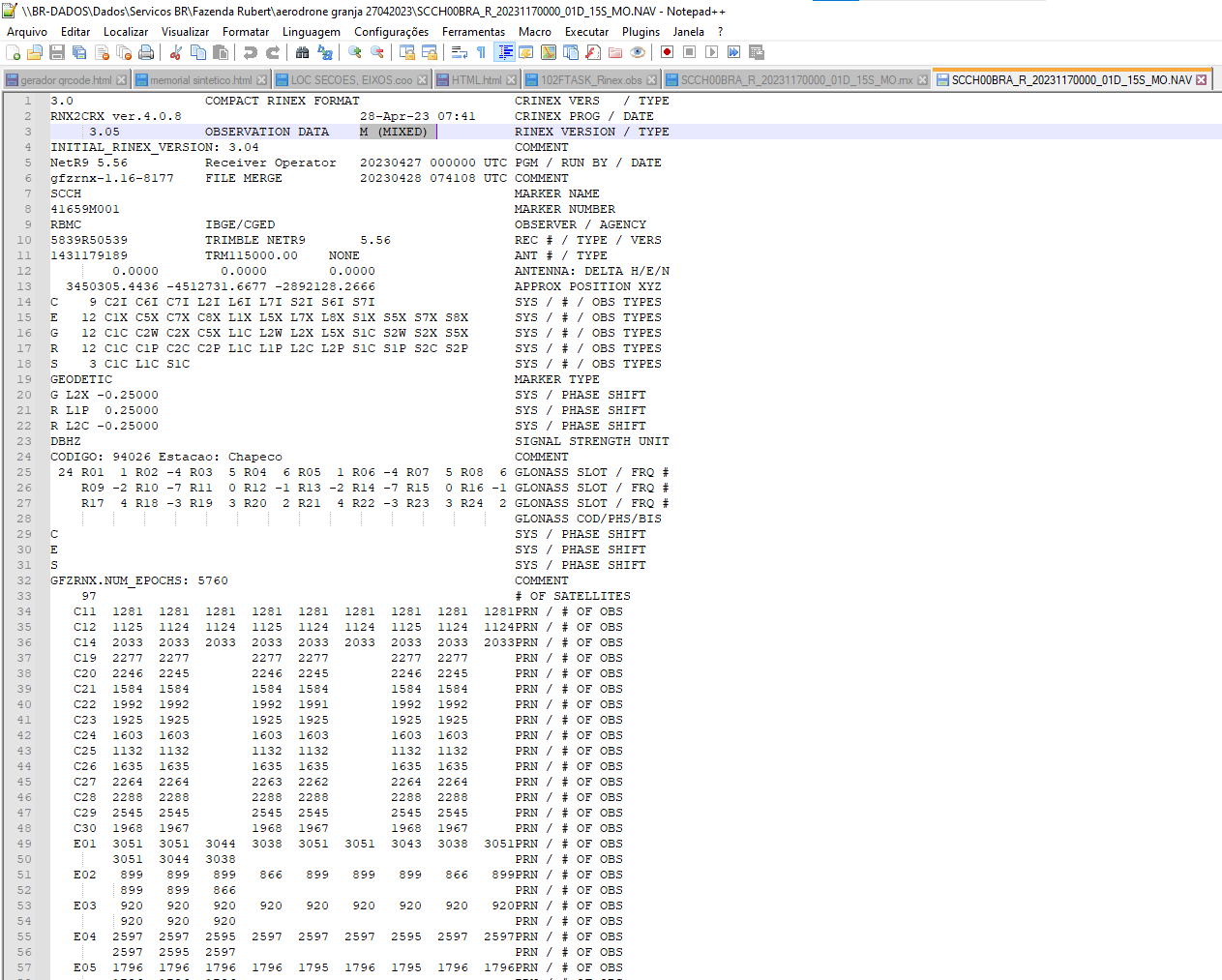
For kinematic data like that, you’ll need a 1 hz correction source. Right now it is 15s interval, which won’t work, especially at the (for kinemtatic) extended baseline length.
I’d also note that Beidou satellites aren’t used in this post-processing due to the lack of their ephemeris. You only have GPS (23n), Glonass (23g), and Galileo (23l) ephemeris. So it complicates achieving FIX solution, particularly on such a baseline.
But as Christian said, the main reason is a 15-second interval of base RINEX observations. Probably it’s possible to request the base log with a suitable rate from IBGE.
Hello,
I did a mapping yesterday, I saved the data with my base and I’m processing it now.
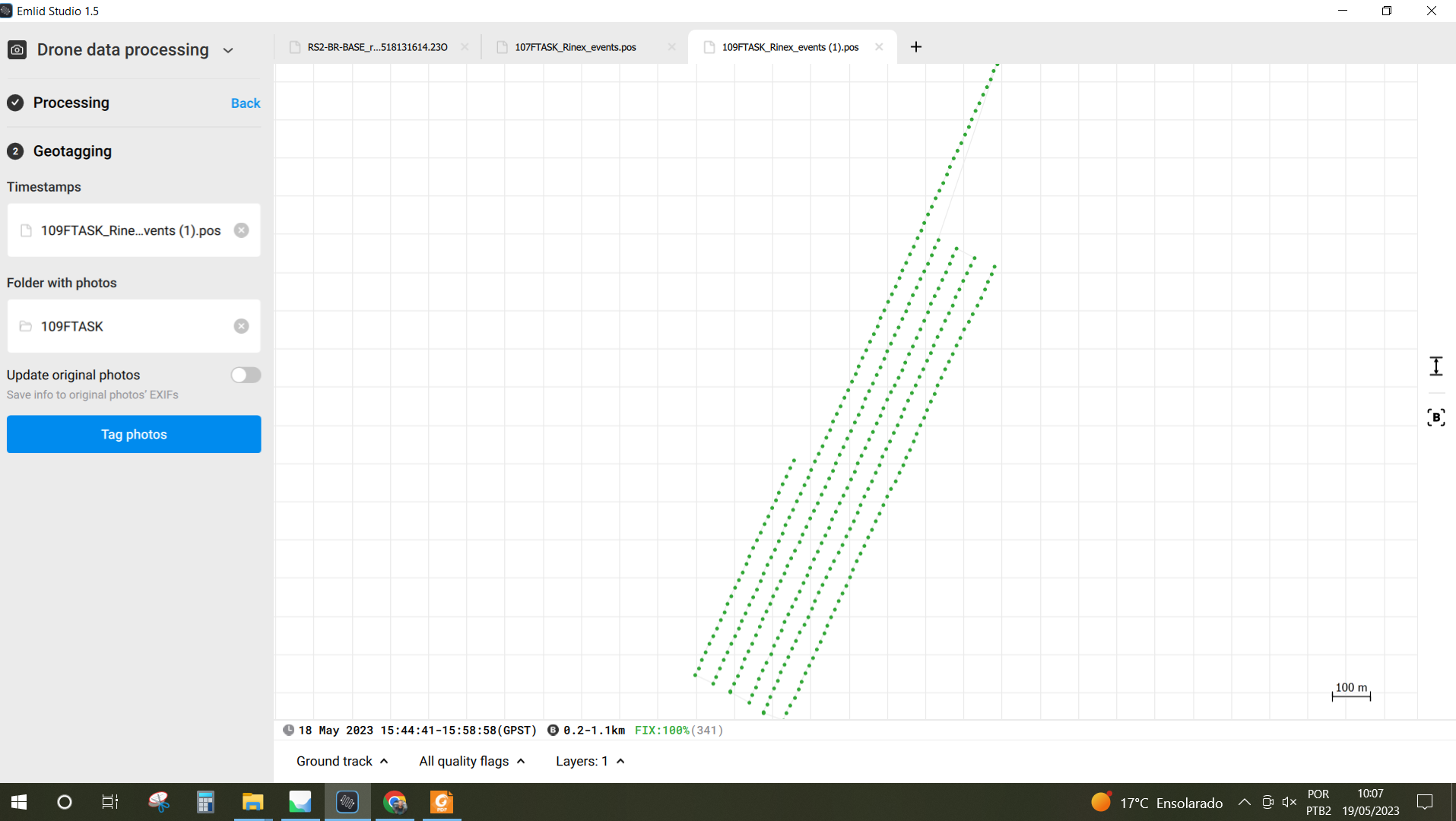
I got 100% fixed points.
However, when indicating the folder with the photos, a message appears in red “Mus contain 490 photos”.
490 is the number of photos and the number of points processed.
Am I passing something off?
Something that doesn’t allow Emlid Studio to getag photos?