Olá.
Comprei meus equipamentos (base e rover RS2) e estou em fazendo testes antes de realizar algum serviço com eles.
Estou fazendo levantamento em uma área na qual 2 colegas já fizeram o levantamento e estou comparando com os meus dados. Os dados deles são equivalentes, mas ao serem comparados com os meus está dando erro de +/- 0,50m na latitude e longitude e +/- 2,0 m na altitude.
Não sei se fiz alguma configuração errada ou o processamento posterior.
Corrigindo a base no IBGE os erros ficam ainda maiores.
Reparei que em Base mode a sra. colocou o Average Single. Esse método de determinação da base utiliza médias de leituras autônomas para a determinação aproximada de um ponto de base. As leituras autônomas são navegadas e sua precisão pode ser comparada a de um GPS de mão, como os Garmin.
Caso a sra. queria precisão e acurácia, o recomendado é sair de um ponto de coordenadas conhecidas. Escolha um marco no terreno e digite as coordenadas Latitude, Longitude e altitude, mais a altura de antena, na opção Manual de determinação da coordenada de base.
Tanto o Average Fix quanto o Average Float precisam que seu Emlid Reach que está na Base esteja recebendo correções de um ponto estacionado em um local conhecido, via NTRIP, LoRA ou outro, para determinar a posição. Veja que o nome das opções remete as soluções que se obtém em campo ao realizar levantamentos via RTK LoRA com seu receptor.
Nesse caso, a sra. pode proceder de duas maneiras:
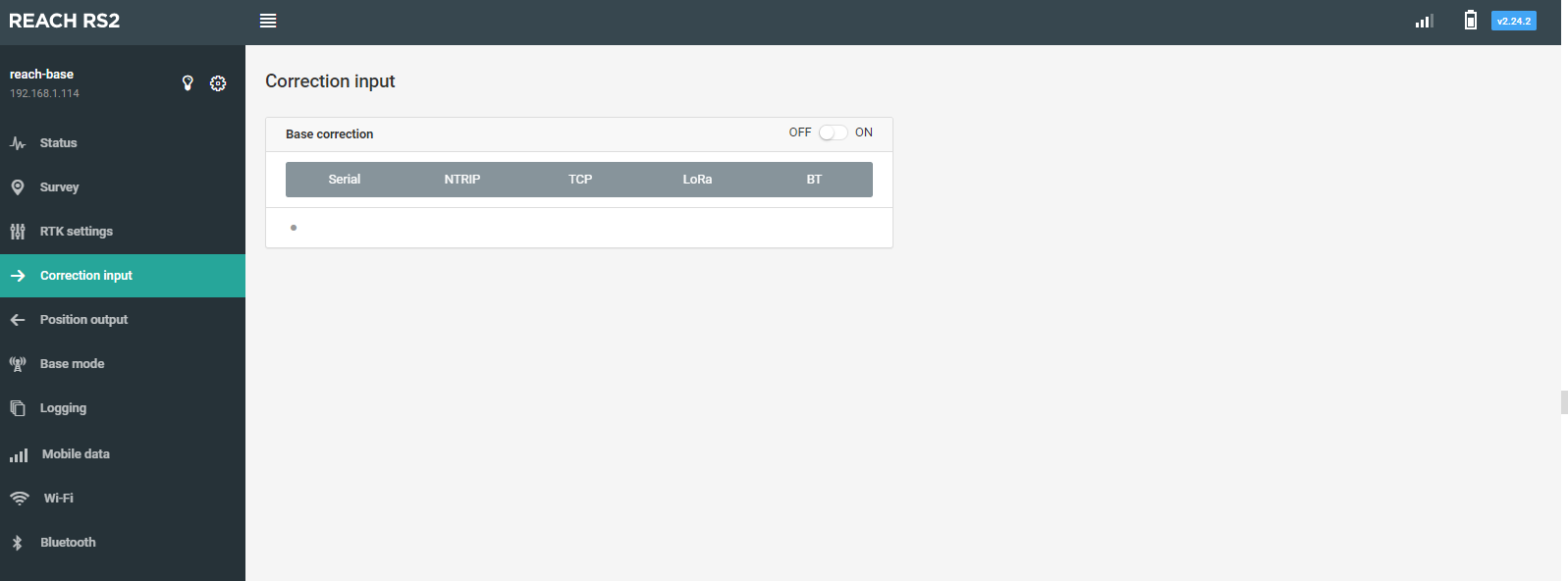
Conectando seu RS base à internet, em seguida configurar a aba Correction input (entrada de correções) para receber correções de uma base da RBMC-IP ou do CEGAT, caso a sra. esteja em São Paulo. Dessa forma, a sra. terá solução fixa e conseguirá determinar a posição da base com precisão centimétrica.
Coletando dados brutos (aba Logging) em RINEX 2.11, por um período de tempo parecido ou maior com esse que relatou na resposta anterior, antes de realizar o levantamento/locação dos pontos, e processá-lo no serviço de PPP do IBGE. Ele te fornecerá coordenadas precisas do ponto onde ficou estacionado o receptor. O serviço tem uma limitação de 20mb no tamanho do arquivo .zip ou .obs a ser enviado.
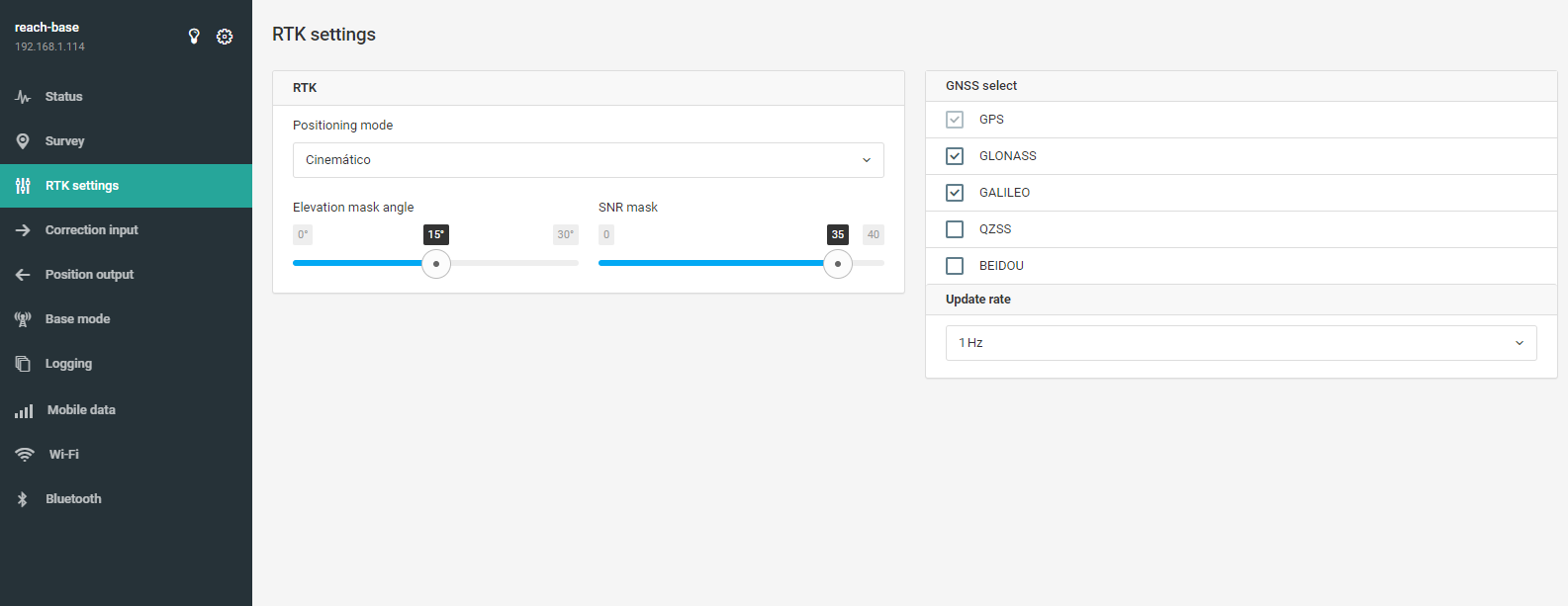
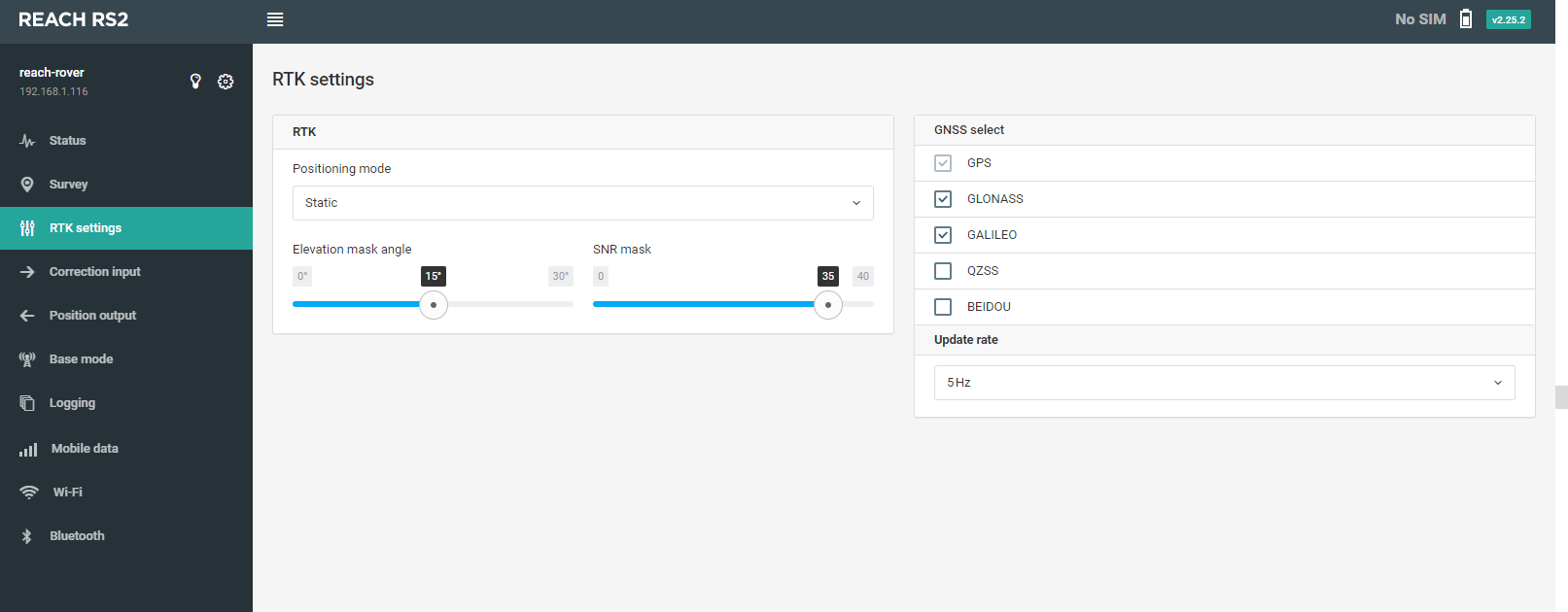
Dica 1 caso use a opção 2: Configure o update rate na aba RTK Settings para 1hz (uma leitura por segundo) para o arquivo RINEX gerado não ficar muito grande.
Dica 2 caso use a opção 2: Quanto mais tempo de coleta, melhor é a solução no PPP, por se tratar de um método de posicionamento absoluto. Apenas se atente para o tamanho gerado pelo seu Reach, há uma limitação de tamanho a ser enviada para o serviço, ~25mb. Maiores que isso costuma não processar.
Algumas dicas para a configuração do seu RS2 como Base e Rover:
Em ambas as unidades:
Indo no menu do RTK Settings, você pode habilitar a constelação chinesa BeiDou para trabalho em campo. Habilitando o BeiDou vai aumentar a quantidade de satélites disponíveis para poder alcançar acurácias melhores nos seus pontos RTK, em testes feitos dentro da cidade de Porto Alegre no RS, temos uma média de 30 a 35 satélites disponíveis dependendo do horário e DOP’s, mas já tivemos relatos de clientes com mais de 40 satélites no campo em locais abertos.
Não é necessário habilitar a opção da constelação QZSS, esta é uma constelação japonesa de 4 satélites, porém esses satélites não passam em nenhuma região das Américas ou Europa, se limitando as regiões próximas ao Japão, leste da Indonésia e Austrália. https://en.wikipedia.org/wiki/Quasi-Zenith_Satellite_System
Na Base:
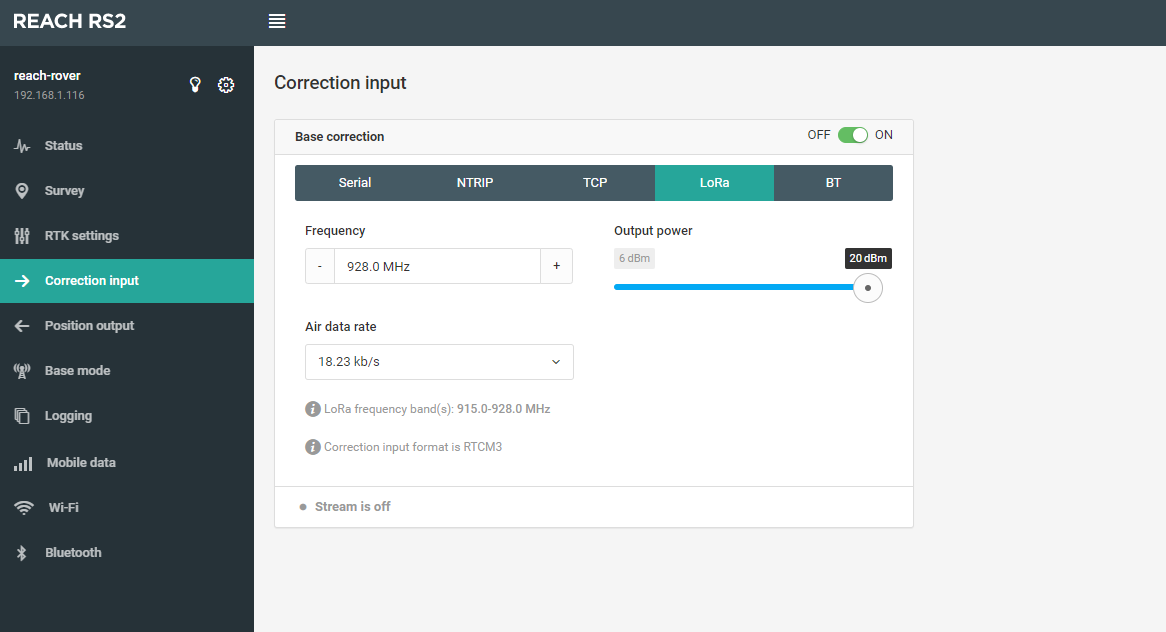
Em Base Mode, na opção Air Data Rate, você pode deixar a menor configuração disponível, normalmente será a opção 9.11 kb/s. Essa configuração, de acordo com os documentos da Emlid (vide segundo parágrafo sobre o rádio LoRA), Air Data Rate influencia na sua linha de base, então nesse caso o menor valor vai lhe condicionar uma maior linha de base.
Para liberar Air Data Rates menores, pode diminuir as frequências de transmissão das mensagens RTCM3, o valor mínimo das frequências das mensagens enviadas de cada constelação é de 0.5Hz, em AR validation deixe 0.1Hz.
Porém diminuindo esse valor de frequência vai aumentar o tempo da sua taxa de atualização no Rover (Ex.: Mensagens RTCM3 em 1 Hz = tempo de resposta para o rover [Age of Corrections]: ~1s / Mensagens RTCM3 em 0.5 Hz = tempo de resposta para o rover: ~2/2.5s)
Se você ativou a constelação BeiDou em RTK Settings, você também habilitar as mensagens RTMC3 do BeiDou! Lembrando que ao habilitar ou desabilitar mensagens RTCM3 também influenciam na opção Air Data Rate.
Na opção Air Data Rate, pode deixar 9.11 kb/s parar as mensagens RTCM3 em 1Hz, está é uma configuração que normalmente recomendamos.
Quando for trabalhar com as médias para a base (Average Single, Float ou Fix), não precisa trabalhar com o tempo de 30 min de acumulação de coordenadas. Se os levantamentos que for realizar, onde não tem uma coordenada conhecida (Average Single), forem maiores que 2 ou 3 horas, pode deixar o tempo mínimo de 0.10s, pois o IBGE consegue processar melhor pontos de base com no mínimo 1h30min.
Após lançado a base, você tem a opção de lançar essas coordenadas para a opção Manual. Para isso clique no ícone (), nessa opção você pode alterar as coordenadas que coletar e também inserir uma altura de antena da base.
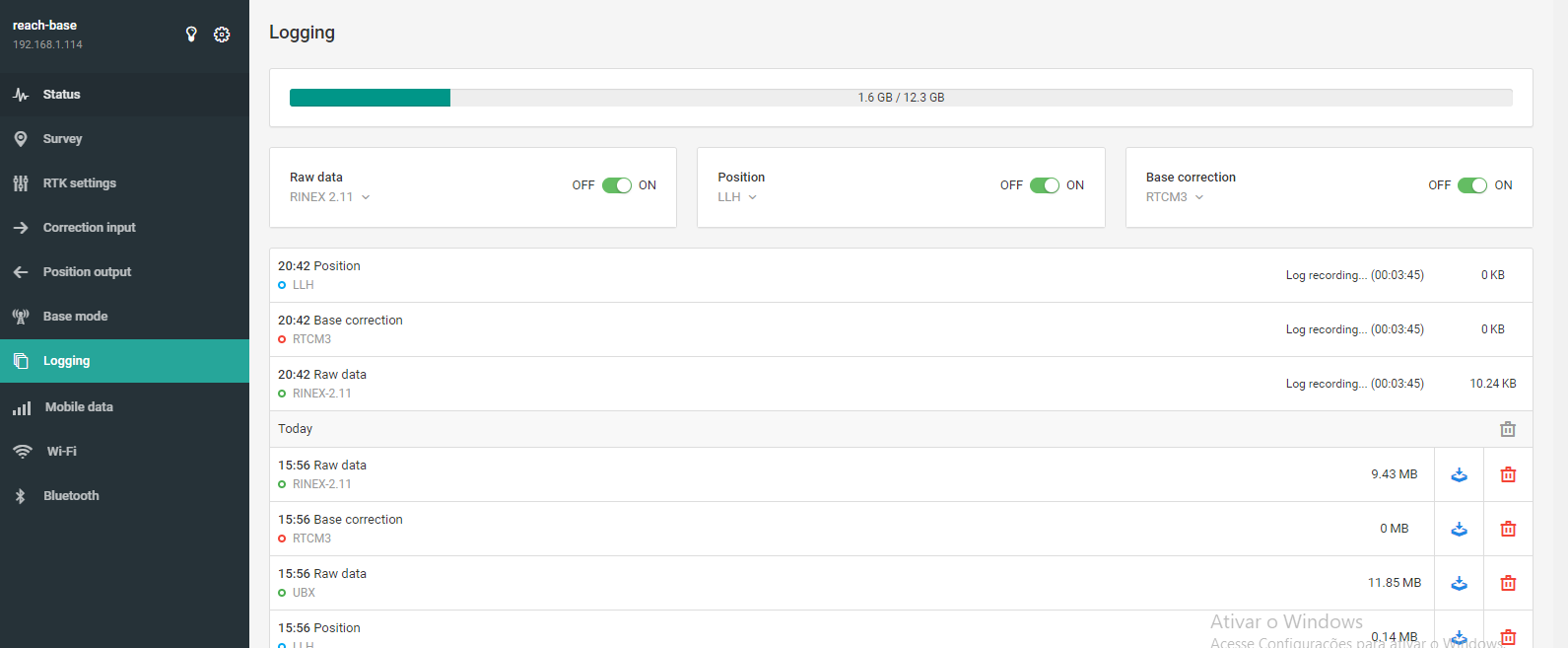
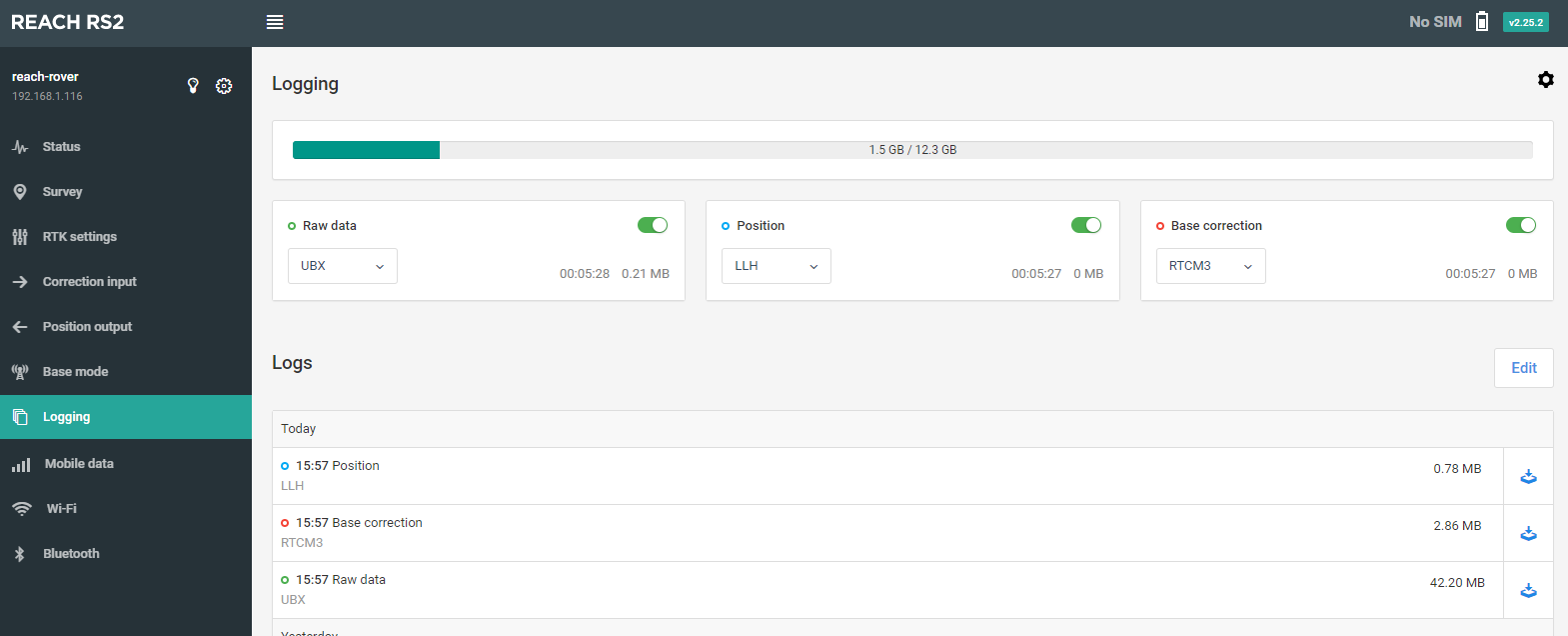
Em Logging, você não precisa manter as opções Position e Base Corrections ativadas, a não ser que necessite destes arquivos com essas informações. Minha recomentação é deixar habilitado somente o Raw Data para gravar os dados brutos no equipamento, seja a Base (para o PPP) ou no Rover (para Pós-Processamento ou para as vistorias do INCRA no caso de um GeoReferenciamento).
Na própria opção Raw Data, logo abaixo do nome da opção voce pode escolher o tipo de arquivo que quer gravar. Seja no formato nativo UBX (U-blox), ou em diversas versões de RINEX. Caso selecionar as opções de RINEX, o próprio equipamento grava em UBX e RINEX.
Muito cuidado na hora de deletar arquivos brutos na tela Logging, enquanto estiver nesta tela, se clicar na lixeira em vermelho o Emlid vai mostrar uma opção para reverter a opção. Caso a tela for atualizada ou você mudar de menu, o arquivo marcado para deletar será deletado permanentemente. No momento não aparenta haver uma maneira de recuperar arquivos deletados acidentalmente no ReachView 2.
No Rover:
Se for trabalhar com LoRa (Correction Input), cuide para tanto a frequência como o Air Data Rate serem iguais aos da base. No caso da frequência é praxe, porém o Air Data Rate é novo, mas se aplica o mesmo procedimento, se na Base estiver selecionada a opção 9.11 kb/s, selecionar a mesma opção no Rover.
O Rover não precisa estar gravando dados brutos constantemente, caso ter necessidade de pegar um ponto para pós processamento ou mesmo para enviar par o INCRA certificar que realizou o levantamento, pode ir em Logging e ativar de acordo com a necessidade.
Bruna, altere o ROVER para o modo cinemático e a BASE para o modo estático e veja se funcionou corretamente, as outras configurações estão certas.
qualquer dúvida estou no whatsapp (22)981313440.