my quad is “almost there”, but I still having problems with telemetry using 3g
Everything works fine, when I use the ip address (number) :
eg. sudo ArduCopter-quad -A udp:192.168.1.20:14550
But when I use a DNS name (I’m using No-ip in the Ground station) :
eg. sudo ArduCopter-quad -A udp:noname.ddns.com:14550
I receive a message, “Permission Denied”, looks like the message is local, because is realy fast.
I can ping in the DNS name without problems, but still receiving this message
Please any idea???
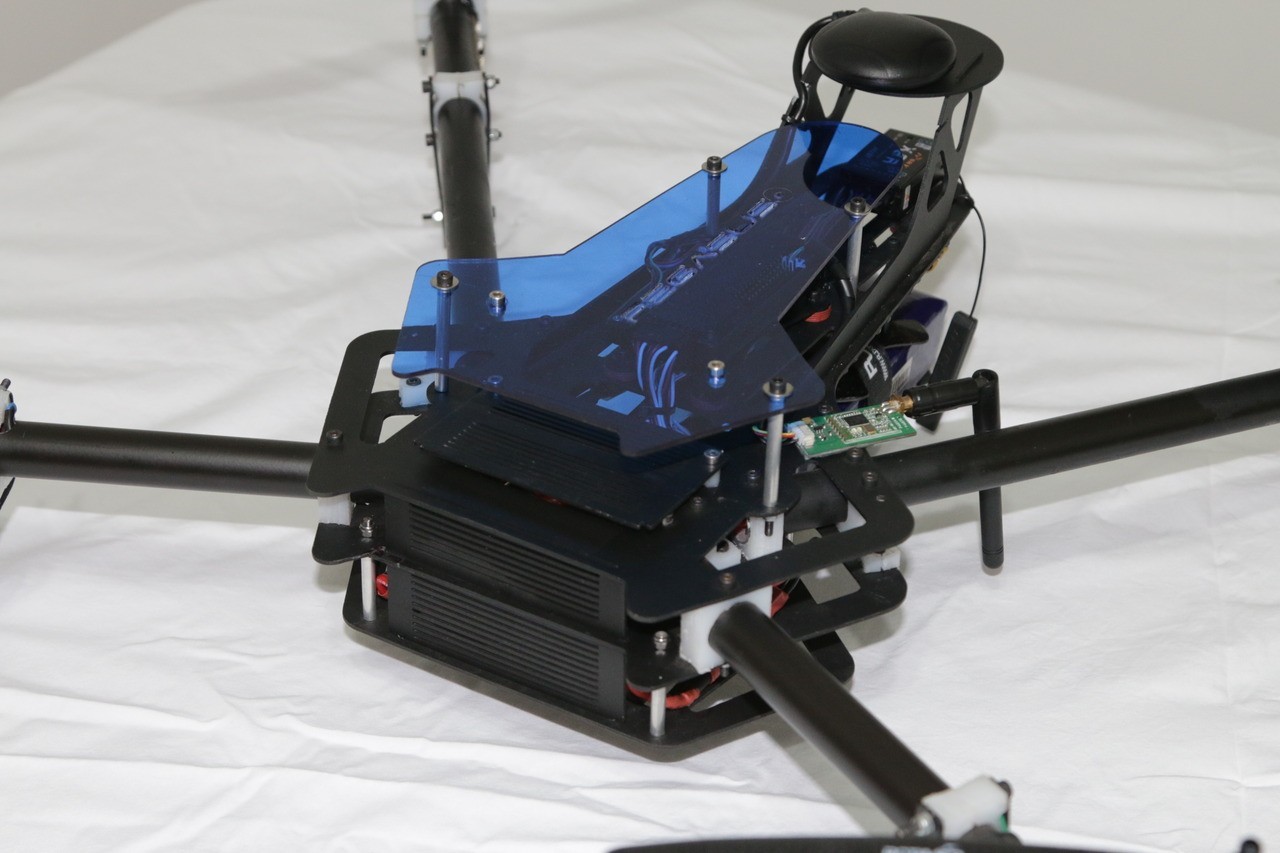
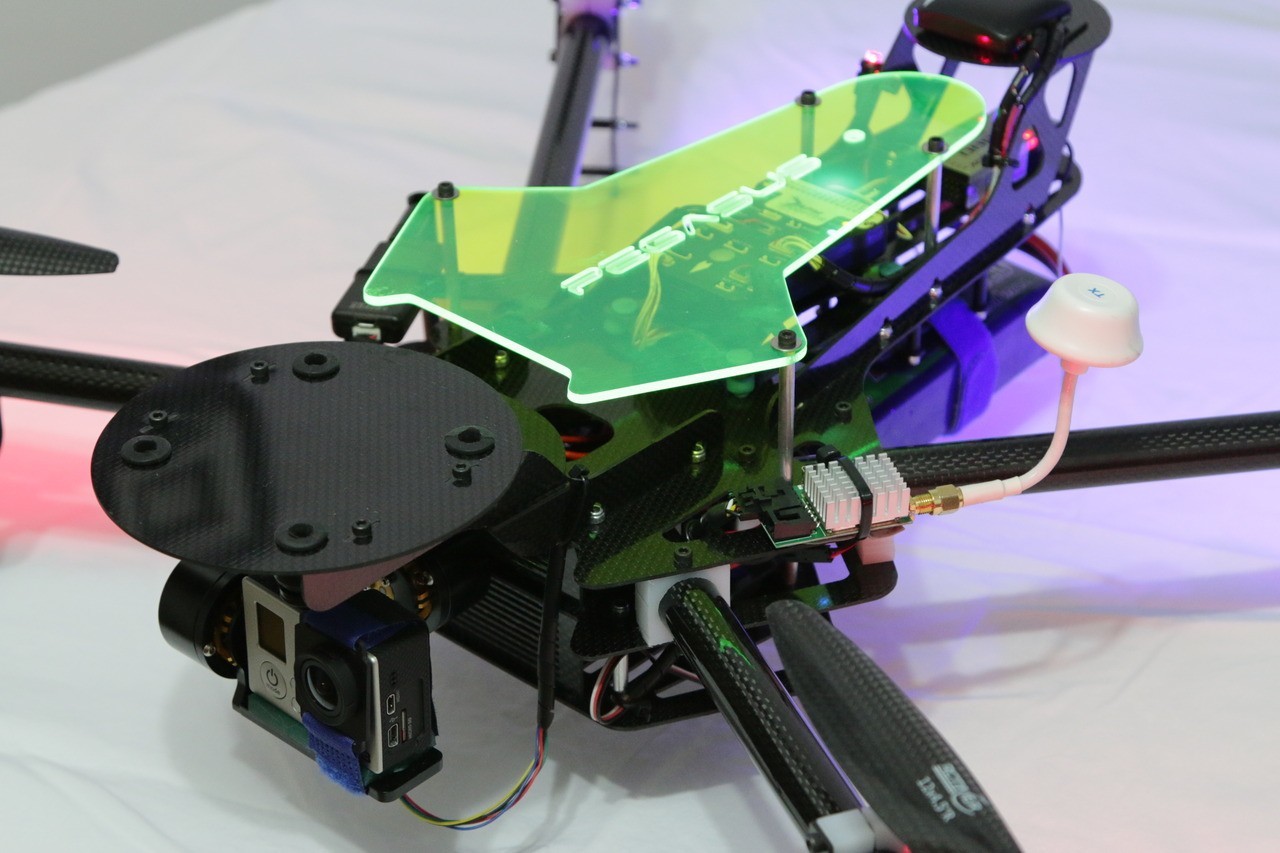
By the way attached my little quad with Tmotors 2814 770kv and custom made frame in carbon fiber 3k. Really strong…… and about 15 minutes flytime…. and look the shock absorvers…very nice
socat -v udp4:noname.ddns.com:14550 udp4-l:50000 sudo ArduCopter-quad -A udp:noname.ddns.com:50000
-v stands for “verbose”. If something’s wrong this switch can help. If everything’s fine, you can get rid of it!
socat is a pretty versatile beast. There’re just too many things one can do using this tool. The man page could really be of help. These are usually well written.
and then start de code:
sudo ArduCopter-quad -a udp:$IP:14550
I did like this, because with another very simple script in crontab I can check the 3g health, kill the process and restart if necessary , I know ping is a little bit “ugly” , not rocket science solution but works perfect, because if I can’t ping everything is wrong.
and for the future , with a simple ping I can test the connection latency to start or not the vídeo streeming for exemple.
Telemetry over 4g/LTE – (Perfect) – Modem Huawei E3276 3G/4G)
(using - ppp - usb-modeswitch wvdial) looks better than sakis3g
and a script to monitoring the connection performance and restart in crontab
Video Streaming over 4g/LTE – (Perfect, only start if the link quality is good)
(Using UV4L)
only 3% of CPU and very good quality, very easy to install (raspberry Side), and for windows, linux or any other devices, because you can see the FPV images using a regular Internet Browser (Eg. Chrome)
WebRTC not installed because uses a lot of CPU.
Joystick (only to test) over 3g/4g.
Quadcopter side – “No-ip” client for DNS, because I can access from anyware , as well in field without monitor and keyboard attached using putty , or from my mobile phone using vSSH Lite or Serverauditor (for Iphone)
APM customized “start” depending on 3G connection and Video Streaming activation
IF no 3g, start with Telemetry over Rf (regular Radio), otherwise use 3G
IF the connection is good starts video streaming , otherwise no, and if during the flight the connection lost quality, stop the video streaming.
Ground station with Mission Planner and No-IP (DNS) for
Broadcast, Modem Huawei E3276 (3G/4G)
A very short video only testing “flight” last week.
Done.
Last Sunday everything tested.
I will do a quick review with important points.
Only one change from original Hardware project :
Logitech c920 Camera instead Raspicam (too noise)
And Software:
UV4L removed, I’m using gStreamer again.
Software - APM 3.3 rc-10