



Making progress, here are some pictures:
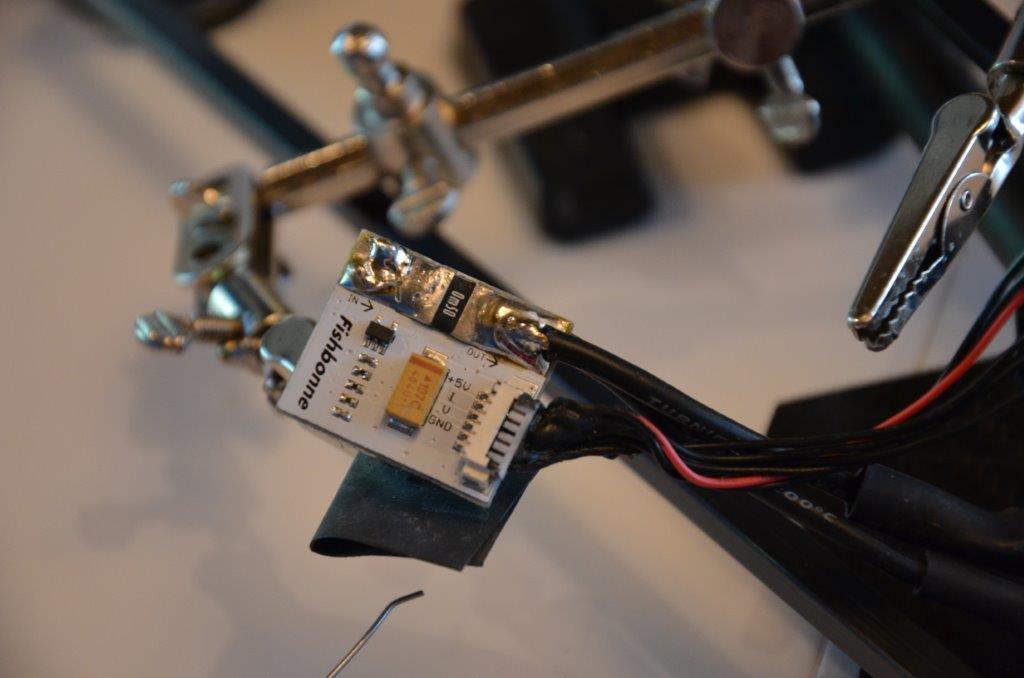
Time to solder everything…



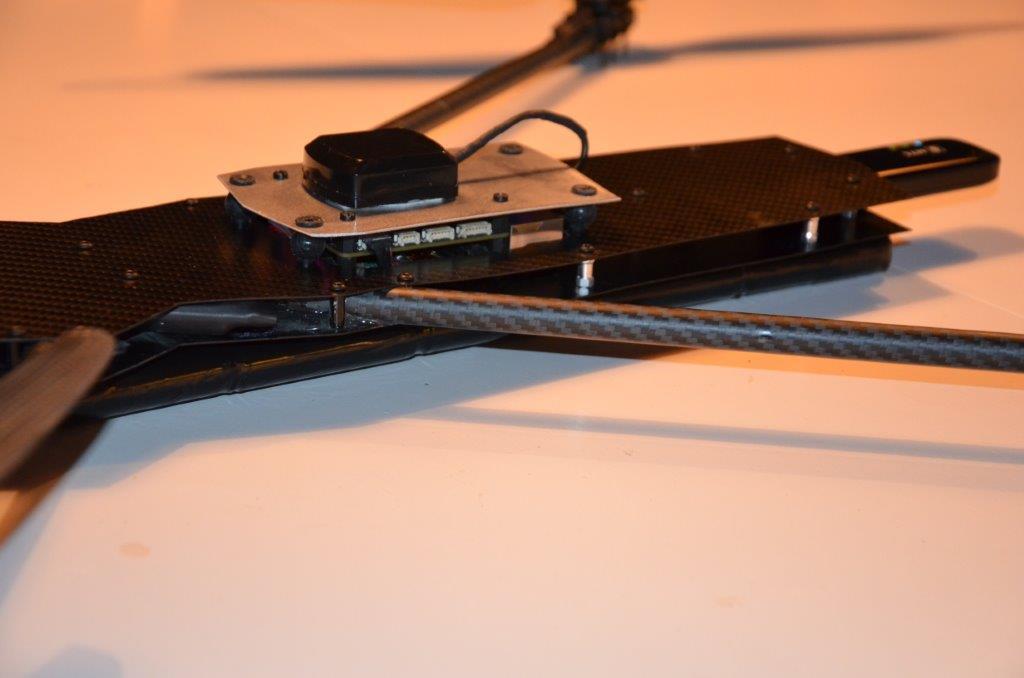
Testfitting everything… structure strength seems ok…but will glue everything in final assembly… Complete weight without batteries about 950gr
I soldered and built a battery for long flight times out of 20 Panasonic 18650 cells. 4S5P, 17 000 mah, around 930gr. Should give 60 minutes of hovertime. but I’m a little worried about the C rating, only a real test will show. eCalc gives : 2.8C at max throttle. 0.8C at hover. Batteries are rated at 1-2C. I have some other smaller and lighter batteries with much higher C rating for lifting gliders etc. Should be able to lift at least 1kg with power to spare.

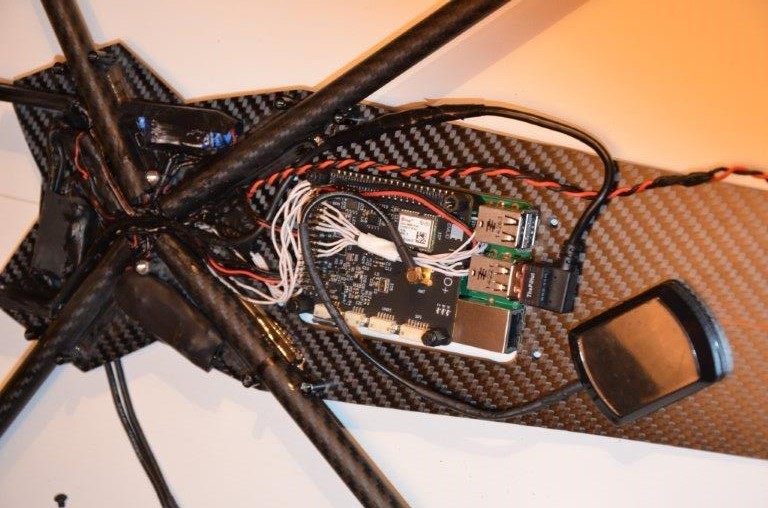
Connecting with Mission Planner and testing camera, tilt, lights, motors…






Getting closer to first test flight… 