Hey I’m willing to start now my first autonomous drone project with navio 2,
so first I would like to share the components setup (some of them already ordered) and get some comments and tips :
No use for this quadcopter? There is no camera or other payload in your list?
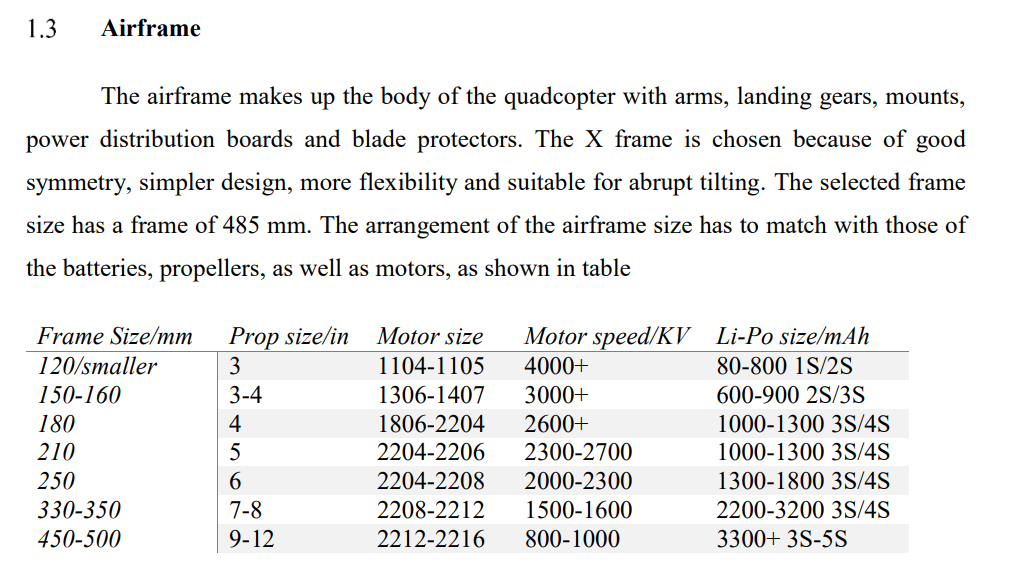
Frame is heavy, battery is heavy, motors and propellers are not adjusted to the battery (KV 935 versus 5S battery) KV 450 would be expected or 3S battery.
For the props you can go to 12" with that frame, search motors with KV450 and good efficiency with 12" propellers at 40 to 50 % power.
By “experience”, it may fit, but it is not the best choice. With 5S you have too much voltage available ( high RPM ) not suitable for usage (endurance versus speed).
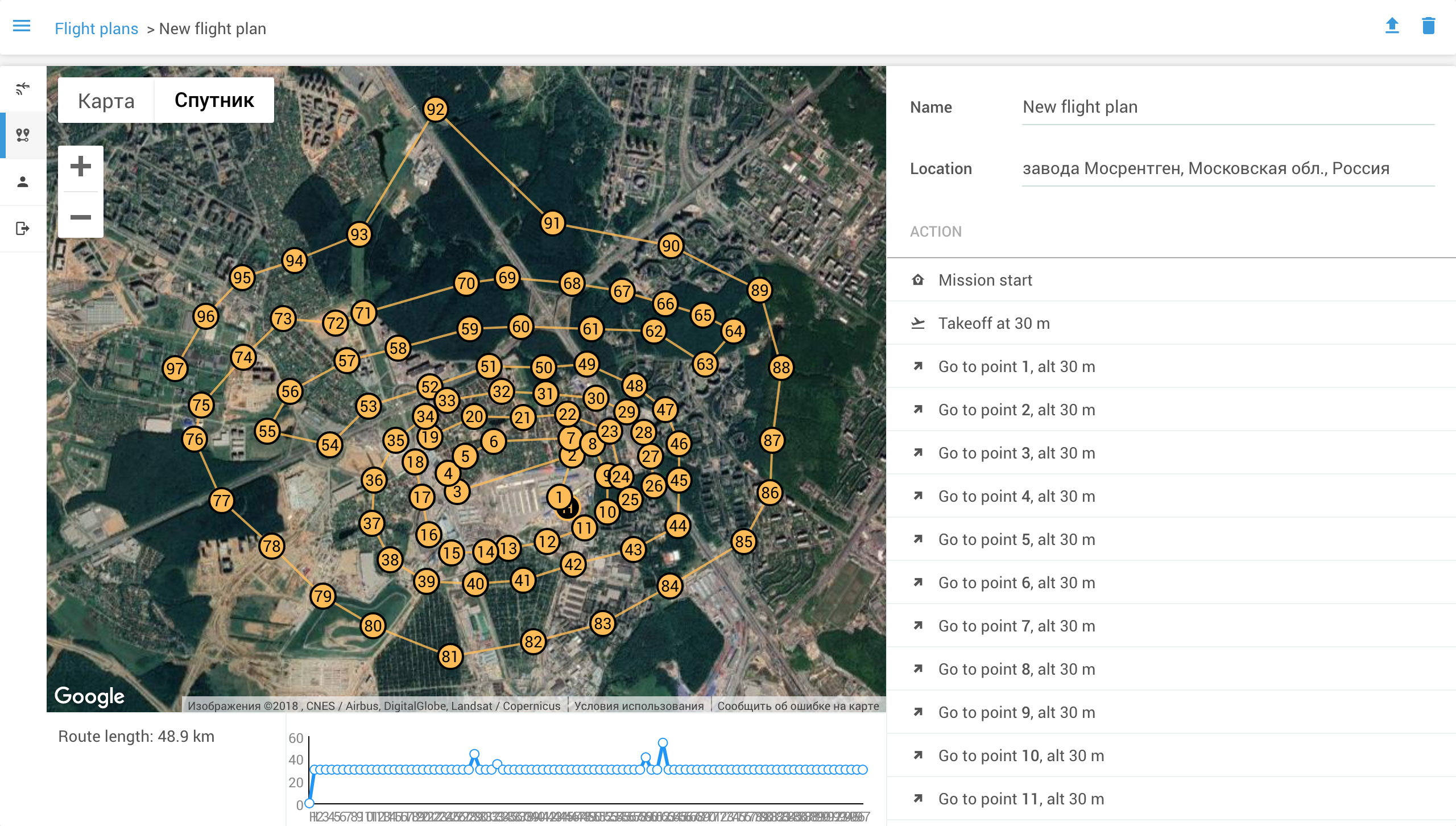
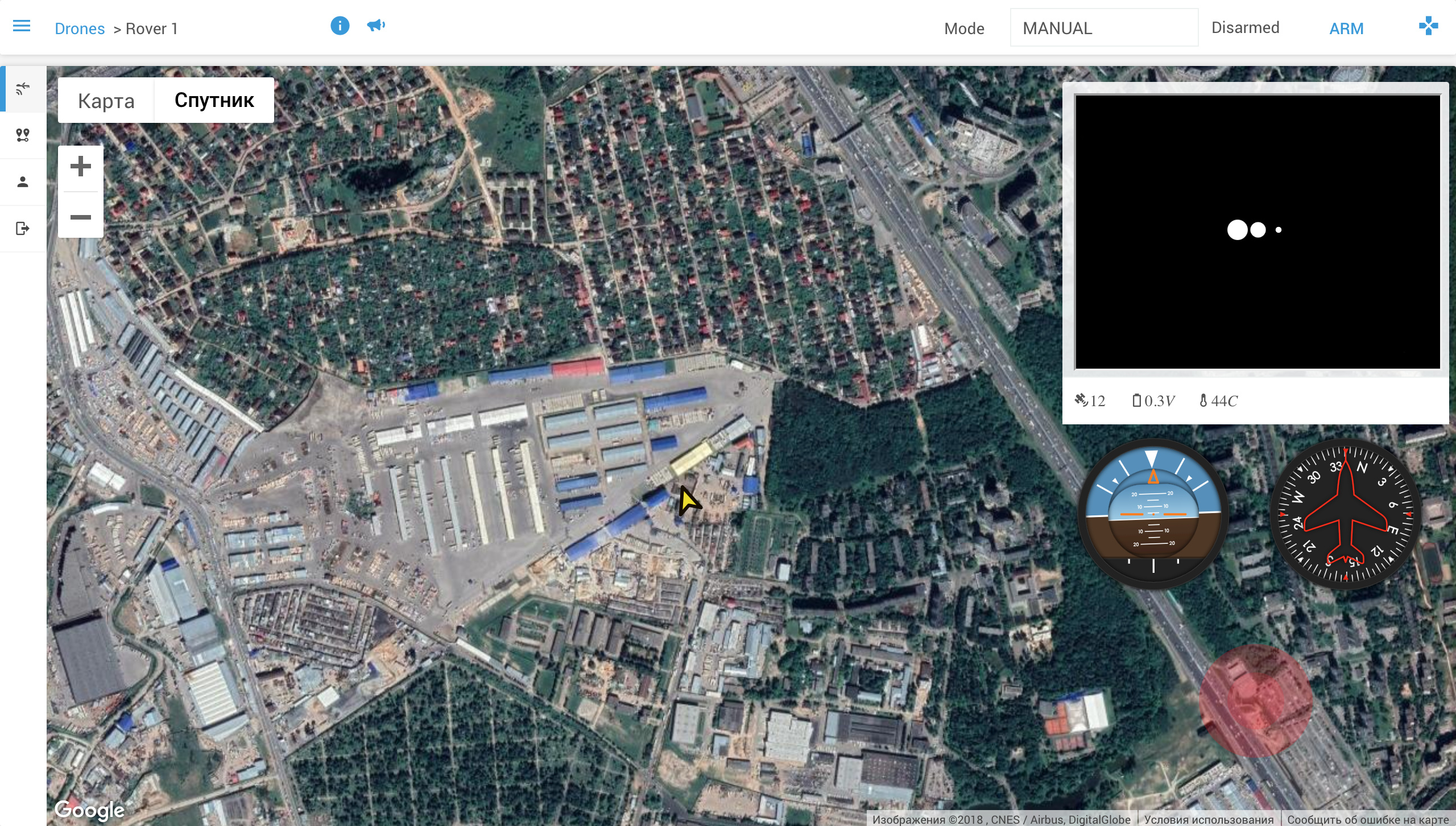
I think my project will help you to control your drone over internet (4g). I’m still working on it and it’s in beta testing now. Here is a front page: GCS.uno and Docs.
It is tested with Navio 2 + Raspberry Pi 3 + Raspicam.