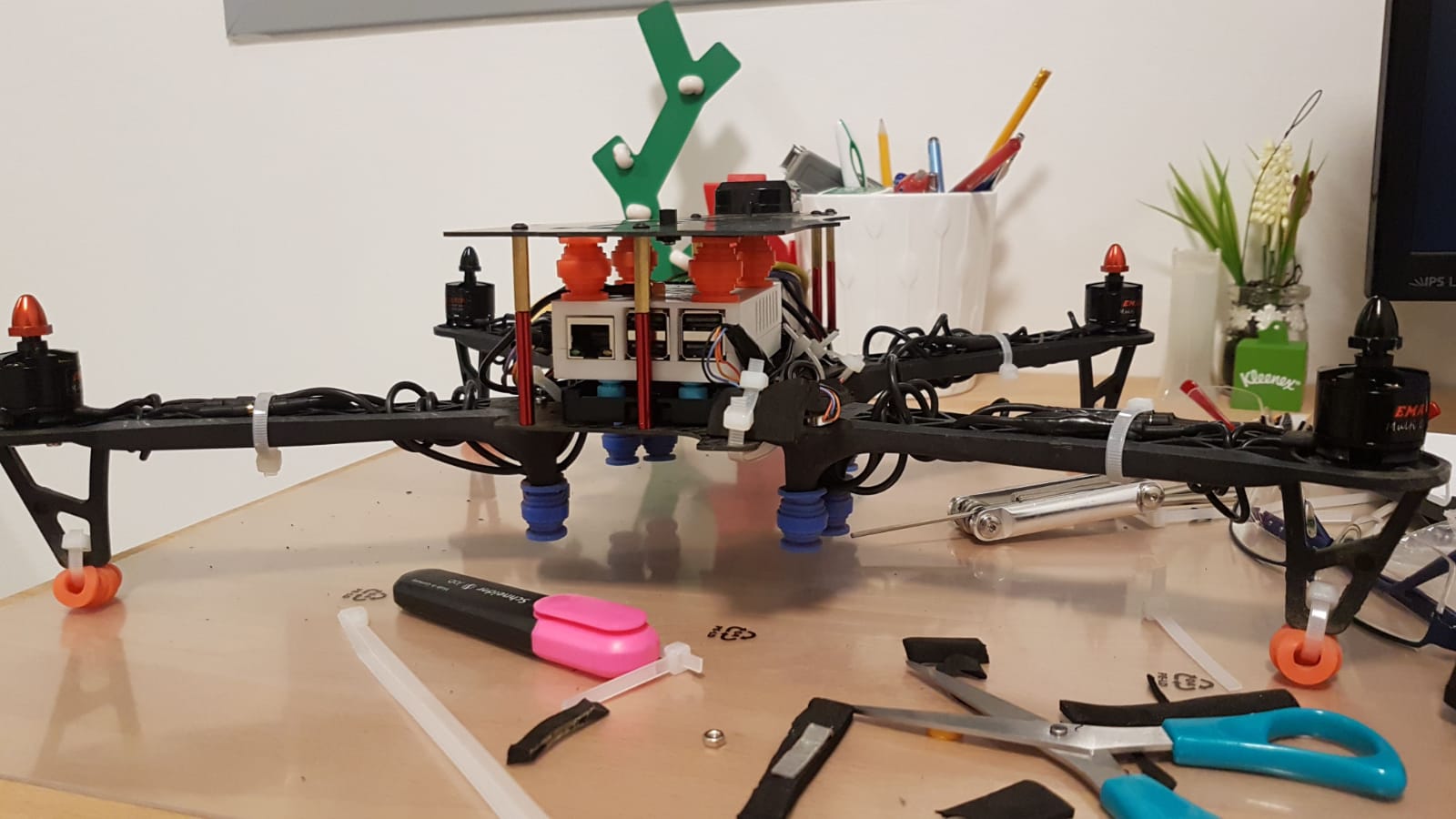

The goal is to make autonomous drone with deep learning.
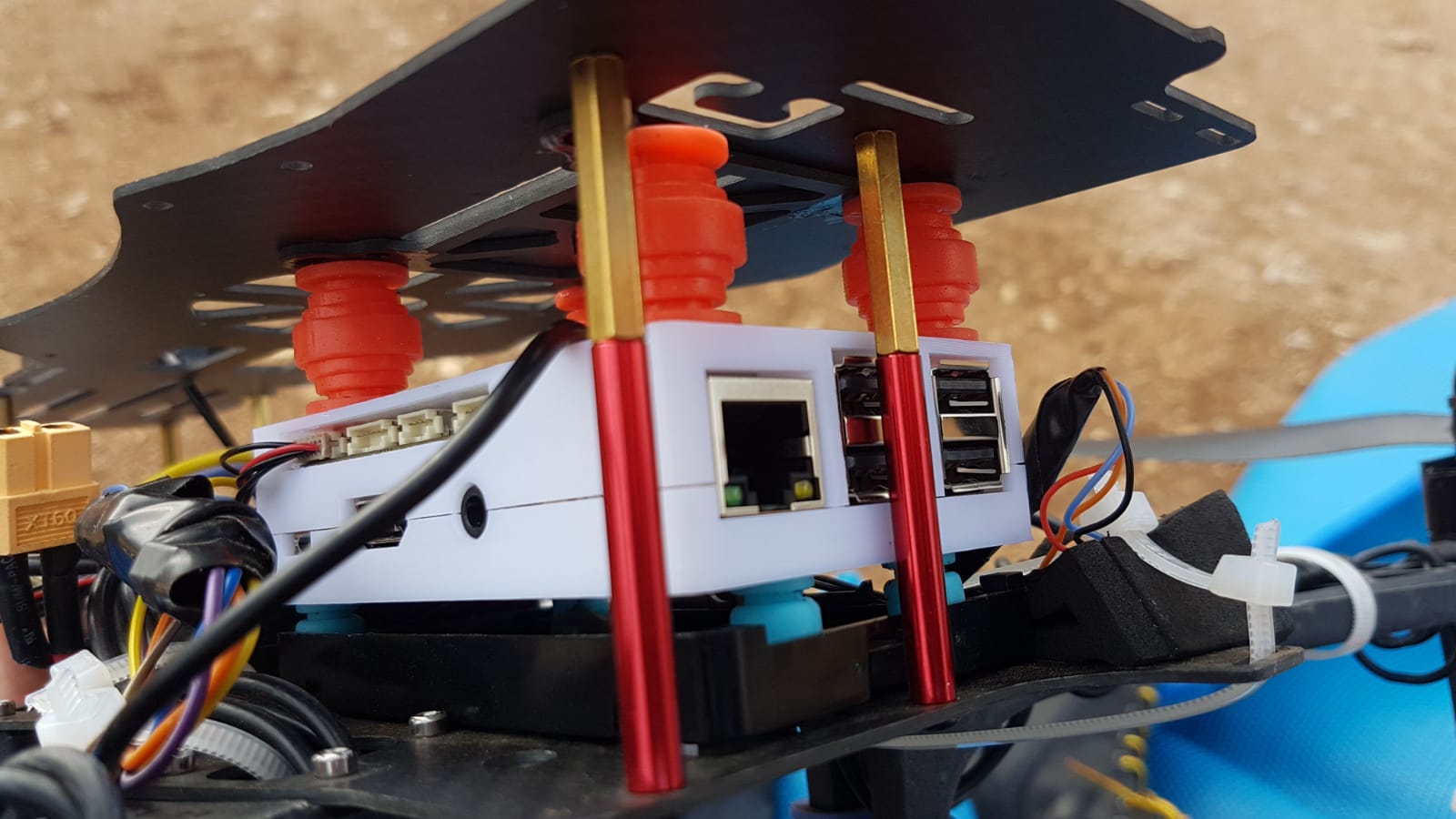
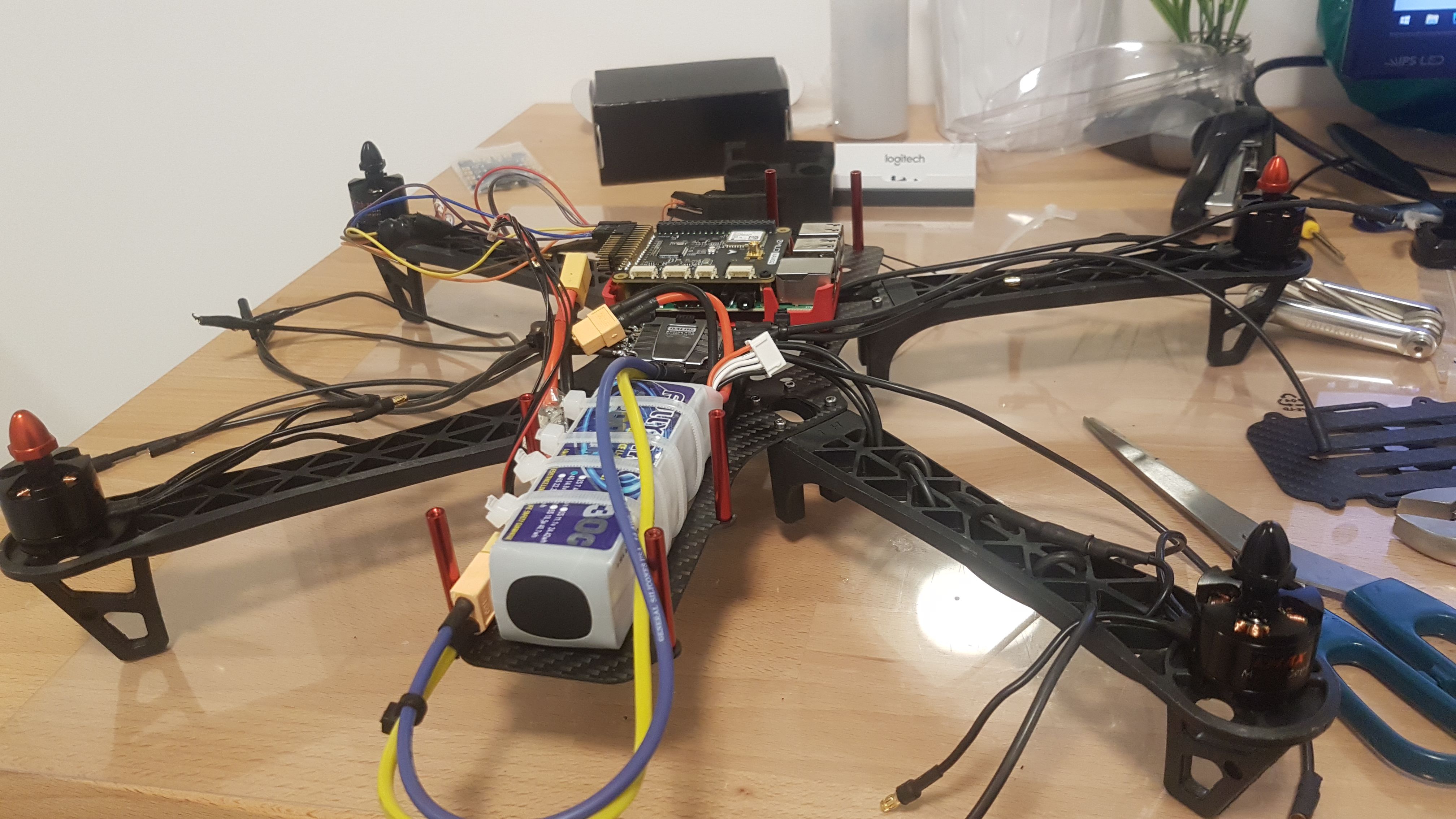
Components: navio2, dalrc 4in1 esc, emax motors, rpi3, frsky xsr-m reciever, more components to be added
Are there any dry tests I can do before real first flight?
The goal is to make autonomous drone with deep learning.
Components: navio2, dalrc 4in1 esc, emax motors, rpi3, frsky xsr-m reciever, more components to be added
Are there any dry tests I can do before real first flight?
Hi @roishachar,
It seems to be a cool drone ![]()
What camera do you want to use with it?
As for the tests, @tatiana.andreeva gave you an answer in this thread.
Keep us updated with your project!
I have tested the motors, I meant to test the stabilization of the drone, to see if the motors operate as it should be to stabilize when the frame get slope right or left
and for the camera, I have rpi cam v2 now, and plan to attach gopro 6 in the near future, hopefully I could stream the video and make some processing on the stream within rpi3-python-opencv/deep learning.
The only way to do it is to test drone in stabilize mode with removed propellers.
Unfortunately, there’re no specific tests and you will need to do it visually and by ear.
https://drive.google.com/open?id=146uqEPcqWFd9Ew5aIzAK2E56DnBps2LK
here are some videos from last flight today, what do you think?
after I added more suspensions on Z axis, the graph is showing max Z vibration 20-25, is it good enough?
Hi @roishachar,
Nice tests ![]()
On the 3rd video, I can see an issue with stabilization.
I’d recommend you to read these two articles (first, second) and try to use them to set up your drone settings.
As for vibration, you can find more info by following this link.
are those tuning are relevant to stabilisation in loiter mode when hovering at constant location without any control too? because as I see it tuned the radio control and movement, not the general stabilisation of the flight.
Hi @roishachar
Yes, those tunings are relevant to any mode. Autotune usually should be enough.
However, you can use advanced settings.
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.